KTO KARATAY UNIVERSITY
FACULTY of ENGINEERING
PHYS-101 LABORATORY MANUAL
NAME
NUMBER
DEPARTMENT
GROUP
EXPERIMENT NAME
1
2
3
4
5
DATE
General Information for Physics Laboratories - Physics 101 and Phys 102
!
Location and Time of Laboratories
All introductory laboratories are conducted on the Physics Lab. Students should
consult the course schedule for the dates.
Labs are two hours long.
!
Preparation for Laboratories
Each experiment is described in the laboratory manual, the relevant section of which
should be read before coming to the lab so that you have a clear understanding of both
the physical principles involved and the detailed experimental procedures. Some
experiments require advance derivation of formulas or planning of experimental
procedures. Unprepared students may not be allowed to perform the experiments.
!
Laboratory Report
Students are required to complete a lab report for each scheduled lab experiment. The
laboratory experiments are designed so that all of the data-taking, analysis, and
report-writing can be finished during the two hour period. All work must be handed in
by the end of the period; under no circumstances will you be permitted to extend the
period or finish your work at home. Students are asked to bring standard lab manual,
~10 sheets of milimetric paper and a file folder for laboratory reports. At the end of
the lab, students required to sign their reports to the instructor.
Each individual student must deliver his/her own individual reports (including with all
the graphs) at the end of the semester. Students working together are likely to submit
the same data.
!
Attendance
Laboratory attendance is mandatory. Students are required to attend all scheduled
meetings of their lab section. Unexcused absence from more than one lab section
meeting, student will receive a failing grade in lab and automatically fail the entire
physics course. Each experiment must be performed in a student’s assigned section.
There is one permission for unexcused make-up lab (switching sections is not
allowed). To receive an excused absence, students must provide an explanatory letter
from a doctor (in the case of illness) or dean (for other extenuating circumstances,
pending department approval).
!
Cell Phones
In accordance with university policy, cell phones must be turned off or set to the
silent mode while students are in lecture or lab sessions. No cell phone calls are
permitted in the lab room.
MAKARALAR
MAKARALAR
AMAÇLAR:
•
Makara sistemlerinin tanıtılması.
•
Makara sistemlerinde kuvvet- a!ırlık ili"kisinin incelenmesi.
•
Palanga sistemlerinin çalı"ma prensiplerinin incelenmesi.
GENEL B!LG!:
Bir i"i kolay "ekilde yapmamıza yarayan araçlara basit makine denir ve bu makineler
uygulanan kuvvetin yönünü veya yolunu de!i"tirerek i"i kolayla"tırırlar. Örne!in kum
havuzunda bir çukur açmak için sadece ellerimizi kullanırsak bu i" biraz zor olur ama e!er bir
kürek yardımıyla çukur açmayı denersek i" kolayla"ır. Kürek, basit makineler için güzel bir
örnektir. Basit makineler; kaldıraç (tahterevalli), makaralar (asansör), çıkrık (kuyudan su
çekmek için kullanılır), e!ik düzlem, vida ve nacak olmak üzere altı çe"ittir.
Basit makineler ile kuvvetten ve yoldan kazanç sa!lanabilir. Ama hepsinden aynı anda kazanç
sa!lamak mümkün de!ildir. Hiçbir basit makinede i"ten kazanç yoktur. Hatta sürtünme gibi
nedenlerden dolayı kayıp vardır. Basit makinelerde moment ve i" prensipleri geçerlidir.
Bir basit makinenin mekanik faydasından söz edilir ise, o makineye uygulanan kuvvetle,
kaldırdı!ı yük arasındaki kıyastan bahsedilmektedir. Bir basit makinede ki yük P, dengeleyen
kuvvet F olsun. Bu makine için mekanik avantaj (kuvvetten kazanç);
Mekanik avantaj=P/F
(1)
olur.
Bu makinede, P’nin yaptı!ı i"’in F’nin yaptı!ı i"e oranına makinenin verimi denir.
(2)
Bu deneyde kullanaca!ımız makara sistemleri de basit makinelerdendir.
2
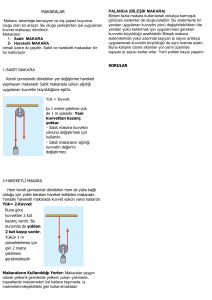
Makaralar:
Makaralar, sabit bir eksen etrafında serbestçe dönebilen, çevresinde ipin
geçebilmesi için olu!u olan basit bir makinedir.
a. Sabit makaralar :
Çevresinden geçen ip çekildi!inde yalnızca dönme hareketi yapabilen makaralara
sabit makara denir.
Sabit makaralarda kuvvet sadece yön de!i"tirir, de!erinde bir azalma olmaz.
Makara ile ip arasında sürtünme önemsiz iken aynı ipin bütün noktalarındaki
gerilme kuvveti aynı oldu!undan kuvvet yüke e"it olur. Kısaca sabit makaralarda
kuvvetten ve yoldan kazanç söz konusu de!ildir.
Moment prensibine göre
(3)
dir.
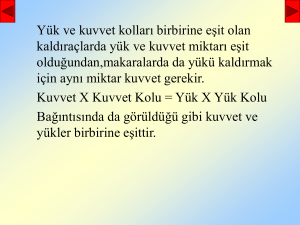
b. Hareketli Makaralar :
Çevresinden ip geçirildi!inde hem dönebilen hem de yükselip alçalabilen
makaralara hareketli makara denir. Aynı ipin bütün noktalarındaki gerilme kuvveti
aynı oldu!undan denge "artına göre; 2F=P ! F= P/2 olur.
Hareketli makaraya ba!lı olan bir yükü kaldırmak için ipi 2h kadar çekmek
gerekir.
Hareketli makaralarda enerjiden kazanç sa!lamaz. Çünkü yük kuvvetin yaptı!ı i" kadar enerji
kazanmaktadır.
Hareketli makaralar, sabit makaralarda oldu!u gibi kuvvetin yönünde de!i"iklik meydana
getirmez. Sabit makara ile kaldıramadı!ımız birçok yükü hareketli makaralar ile kaldırabiliriz.
3
NOT: Hareketli makarada makara a!ırlı!ı ihmal edilmez ise, makaranın a!ırlı!ı P yüküne
dahil edilir. E!er makara a!ırlı!ı ihmal edilirse kuvvetten kazanç olur.
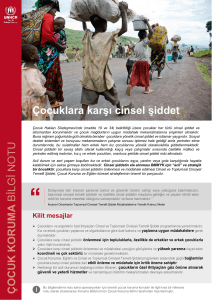
c. Palangalar:
(a)
(b)
(c)
Hareketli ve sabit makara gruplarından olu"an sistemlere palanga denir.
Palangalar hem kuvvetten kazanç sa!lar hem de uygulanan kuvvetin yönünü de!i"tirir.
Palangalar ile çok büyük kuvvetleri hareket ettirmek mümkündür. Bir palangada ne kadar çok
ip ve makara kullanılırsa uygulanacak kuvvet de o kadar artacaktır. Palangaların kaldıraca!ı
kuvvet miktarını belirlemek için bu sistemde kullanılan ip sayıları ile makaraların toplam
yükü ile ta"ınacak yükün toplamı hesaba katılır. Bu ifade formüle aktarılırsa;
(4)
yani
(5)
olarak gösterilir.
4
ARAÇLAR:
•
Platform
•
#p
•
2 adet tekli makara
•
A!ırlık takımı
•
2 adet çiftli makara
•
Dinamometre
•
1 adet üçlü makara
DENEY!N YAPILI"I:
A ) Sabit ve hareketli makaraların kullanılması
1) Sabit bir makara platformun bir çengeline takılır ve etrafından ip
geçirilir. #pin ucuna 1 kg’ lık a!ırlık asılır ve ipin di!er ucuna
dinamometre takılarak çekme kuvveti ölçülür. (Sette kullanılan
makaraların a!ırlıkları ve sürtünmeler çok küçük oldu!u için ihmal
edilir.)
2) Platformun ikinci çengeline, biri sabit di!eri hareketli iki makara (iple
birbirine geçirilerek) takılır. Ucuna 1 kg’ lık a!ırlık asılır ve ipin uç
kısmına takılan dinamometre aracılı!ıyla kuvvet ölçülür
5
3) Platformun üçüncü çengeline bu sefer biri sabit ikisi hareketli üç
makara(yine iple birbirlerine geçirilerek)takılır. Ucuna aynı a!ırlık
tekrar takılır ve dinamometre aracılı!ı ile kuvvet ölçülür.
4) Son olarak dinamometreden elde edilen veriler Newton birimine çevrilerek deney
raporundaki tabloya yerle"tirilir.
B ) Makara sistemlerinde yer de#i$tirme (x)
Bir sabit makara ve bir hareketli makara iple birbirlerine geçirildikten sonra çengelli
platforma takılır. Ucuna yarım kilogramlık bir yük takılır. #pin ucuna bir dinamometre
takılır ve kuvvet ölçülür. Daha sonra hazırlanan bu düzene!in yanına çengelli metre
takılır. Kuvvetin a"a!ı çekildi!i uzunluk ile yükün yer de!i"tirmesi cetvel üzerinden
hesaplanır. Makara sayısı arttırılarak aynı düzenek üç kez tekrarlanır ve farklılıklar
gözlenir.
C.) Makara sistemlerinde açının kuvvete etkisi
$ekildeki gibi bir ucu serbest di!er ucu sabit bir ipin üzerine hareketli bir makara
yerle"tirilir. #pin ucu çekilerek açı de!i"tirilir(bilinen üç açı yeterli olacaktır 60, 120,
180). Açının de!i"imini takiben ipin ucuna takılan dinamometre ile yükün ne kadar
kuvvetle çekildi!i ölçülür ve deney raporunda verilen tabloya veriler yerle"tirilir.
6
DENEY RAPORU:
Adı- Soyadı:......……………....
Numara: ....…………………...
Sınıf:………....………………..
Tarih:………….……………....
A.
1. Düzenek
2. Düzenek
3. Düzenek
Dinamometreden
okunan de!erler
Elde etti!iniz verileri kullanarak makara sistemleri hakkında yorumlarınızı kaydediniz.
B.
1. Düzenek
2. Düzenek
3. Düzenek
Makara sayısı
Yer
de!i"tirme(cm)
Elde etti!iniz verileri kullanarak yorumlarınızı kaydediniz.
7
C.
600
1200
1800
Dinamometreden
okunan de!erler
Elde etti!iniz veriler do!rultusunda açı ile kuvvet arasında bir ili"ki olup olmadı!ı
konusundaki yorumlarınızı kaydediniz.
8
BAS!T SARKAÇ
SARKAÇLAR
AMAÇLAR:
1. Basit sarkacın salınımını etkileyen faktörlerin incelenmesi ; boy, kütle.
2. Basit sarkaçta periyodun hesaplanması.
GENEL B!LG!:
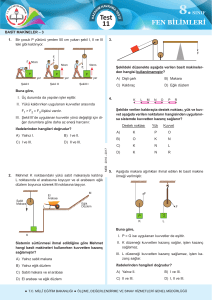
Basit sarkaç, periyodik salınım hareketi yapan bir mekanik sistemdir. Sabit
l uzunlu!undaki hafif bir telin ucuna asılı noktasal bir m kütlesinden
meydana gelir. Telin üst ucu sabittir. Hareket dü"ey bir düzlemde gerçekle"ir
ve (serbest dü"meye bırakılan her cisim gibi) m kütlesinden kaynaklı olarak
yer çekimi kuvveti ile beslenir.
Basit sarkaç, hareketi boyunca potansiyel enerjiyi kinetik enerjiye, kinetik
enerjiyi potansiyel enerjiye çevirir.
Bir sarkacın basit sarkaç olarak adlandırılabilmesi için bazı kabuller yapılmalıdır. Öncelikle
her türlü sürtünme ihmal edilmelidir ve tel ile yük arasındaki açı(!) en fazla 80 olmalıdır.
Ayrıca kullanılan telin a!ırlı!ı ihmal edilmeli ve esnek olmamalıdır. Basit sarkaçta periyot
(salınım);
•
kütleye ba!lı de!ildir.
•
açıya ba!lı de!ildir.
•
formülü
(1)
dir.
Bu "artlar altında, ipe ba!lı olan cisme etki eden kuvvetler a"a!ıdaki "ekilde belirtilmi"tir.
2
l: Sabit ip uzunlu!u
g: Yer çekimi ivmesi
mg: Yer çekimi kuvveti
3
ARAÇLAR:
•
Platform
•
Üç adet tel
•
Farklı de!erlerde a!ırlıklar (tel üzerinde istenilen noktaya sabitlenebilen a!ırlıklar)
•
Aynı de!erde a!ırlıklar (tel üzerinde istenilen noktaya sabitlenebilen a!ırlıklar)
DENEY!N YAPILI"I:
A. Aynı Boyda, Farklı A#ırlıklara Sahip Sarkaçlar
1. Üç adet aynı boydaki tel, platformdaki yerlerine takılır.
2. Uçlarına farklı de!erlerdeki a!ırlıklar takılır ve salınıma
bırakılır.
3.Her birinin periyodu deney raporundaki tabloya saniye
cinsinden kaydedilir.
B. Farklı Boyda, Aynı A#ırlıklara Sahip Sarkaçlar
1. Daha sonra boyları farklı olan üç adet ip çengellere
geçirilir.
2. Uçlarına de!erleri aynı olan a!ırlıklar takılır ve salınıma
bırakılır.
3. Burada da her birinin periyodu deney raporundaki tabloya
saniye cinsinden kaydedilir
4
DENEY RAPORU:
Adı- Soyadı:......……………....
Numara: ....…………………...
Sınıf:………....………………..
Tarih:………….……………....
A.
1. Tel
2. Tel
3. Tel
1. Tel
2. Tel
3. Tel
A!ırlıklar
Salınım sayısı
Periyodu
B.
Boyu
Salınım sayısı
Periyodu
5
1. Elde etti!iniz verilere göre birinci düzenekteki a!ırlıkların farklı olmasının periyodik
harekete etkisini yorumlayınız.
2. "kinci düzenekte ip boylarının farklı olmasının ilk düzene!e göre periyotta nasıl bir
de!i#ime neden oldu!unu yorumlayınız.
6
HOOKE YASASI
HOOKE YASASI
AMAÇ:
1. Herhangi bir kuvvet uygulanarak gerildi!i zaman yayın nasıl davrandı!ını ara"tırmak
ve bu davranı"ı Hooke Yasasın tam olarak açıkladı!ını ispatlamak.
2. Gerilmi" yayın salınım hareketi için iyi bir örnek oldu!unu göstermek.
GENEL B!LG!LER:
Hooke Yasası:
#deal bir yay, üretilen kuvvetin yayın ne kadar gerildi!ine ba!lı oldu!u bir sistemdir. Bu
davranı" Hooke Yasası ile tanımlanır. Hooke Yasasına göre, bir yayı normal uzunlu!undan
kadar uzun olacak "ekilde germek için
olarak tanımlanan bir kuvvete
ihtiyacımız olur. Buradaki k yay sabitidir ve her bir yay için farklıdır. Dolayısıyla, Hooke
Yasasını ispatlayabilmek için yaya uygulanan kuvvetin (F) esneme miktarı (
) ile orantılı
oldu!unu ve bu oranın sabit bir de!erde (k) oldu!unu göstermelisiniz.
Deneyimizde, yaya a!ırlık (m) ba!layarak esnemesini sa!layan kuvveti olu"turuyoruz. Bu
yüzden yayı esnetmeye çalı"an kuvvet yerçekiminin a!ırlı!a uyguladı!ı kuvvet oluyor:
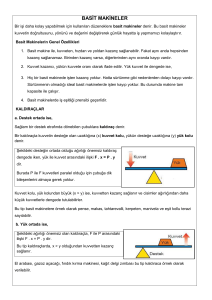
. $ekil 1. de gösteril gibi; yerçekimi kuvveti a"a!ıya do!rudur, yayın a!ırlı!a
uyguladı!ı kuvvet yukarı dorudur. Yayımız bu iki kuvvet birbirine e"it olana dek esneyebilir.
$ekil 1. Denge konumundaki yay sistemi
1
(1)
yada
(2)
Kuvvetlerin birbirine e!it oldu"u bu nokta denge noktası olarak adlandırılır. Kütle- yay
sistemi ekstra bir kuvvet uygulanmadı"ı sürece denge konumunda kalabilir. (2) denklemden
yararlanırsak m, g ve
biliniyorken ya da ölçebiliyorken k sabitini hesaplayabiliriz ve bu
yöntem bu deneyde kullanabilece"iniz bir yöntem.
Salınım:
Yukarıda, kütle-yay sisteminin durdu"u pozisyon denge konumudur,
demi!tik. Bu
durum #ekil 2. nin ilk kısmında gösterilmektedir. Buna kar!ın, e"er yay a!a"ı do"ru çekilip
serbest bırakılarak denge konumundan öteye esnetilirse, kütlemize etki eden yay kuvveti
yerçekimi kuvvetinden büyük olacaktır ve bu yüzden kütle yukarı do"ru ivmelenecektir,
.
Bu ivmenin etkisiyle hız kazanmaya ba!layacaktır. Tam denge konumuna geldi"i zaman
kütlemize etki eden net kuvvet sıfır olmasına ra"men belirli bir hız kazandı"ı için hareketine
aynı yönde devam edecektir. Denge noktasının üstünde iken, yerçekimi kuvveti yay
kuvvetinden büyük olur ve ivme a!a"ı yönlü olur ve kütlemizin sahip oldu"u hızı azaltır.
Yayın ucundaki kütlemizin hızı sıfırlandı"ı anda yerçekimi kuvveti yönünde hareket etmeye
ba!lar. Tekrar denge konumuna geldi"inde kütleye etki eden kuvvetler e!it olur ve birbirini
yok eder fakat kütlemiz belirli bir hıza sahiptir ve a!a"ı yönlü hareketine devam eder. Bunun
sonucu olarak kütlemiz denge konumu etrafında salınım yapmaya ba!lar. Bu salınım
hareketinin tam bir turu ve bu esnadaki kuvvet, ivme ve hız durumları #ekil 2. de
verilmektedir. (Deneyimizde bu salınım hareketini olu!turan kuvveti bilebilmek için de"i!ik
a"ırlıklar kullanaca"ız.) Salınım hareketinin tam bir turu için geçen süreye period denir ve
yay sabiti ile yaya ba"lanan toplam kütle miktarı tarafından belirlenir.
2
Yay-kütle tutucu
sistemimize gerekli m
kütlesini ekleyip denge
konumunu belirliyoruz.
Yay-kütle tutucu
sitemini kütlesiz haline
geri dönmesi için
serbest bırakıyoruz.
Bu konumda iken
gerekli m kütlesini
yava!ça kütle tutucuya
yerle!tirip sistemi
serbest bırakıyoruz.
Ekledi"imiz kütlenin etkisi ile
sistemimiz salınım hareketi
yapmaya ba!lar. Yayımız
kütlenin etkisi ile inebilece"i
en alt noktaya iner. V=0, t=0.
Sistemimiz inebilece"i
en alt noktaya indikten
sonra bir anlı"ına durup
hareketine yukarı
yönde devam eder ve
V=Vmax olur. t=T/4
Yukarı yöndeki hareketi
ise hızı sıfırlanana
kadar devam eder. Hızı
sıfırlandı"ı anda bir an
durup tekrar ters yönde
harekete ba!lar. t=T/2
Denge konumundan
geçerken hızı tekrar
maksimum olur ve net
kuvvet sıfır olmasına
ra"men hareketine aynı
yönde devam eder.
t=3T/4
Sitemimizin hızı sıfırlanana
kadar a!a"ı yönlü hareketine
devam eder. Hızının
sıfırlandı"ı anda etki eden net
kuvvet sıfırdan farklı oldu"u
için salınım hareketi bu
!ekilde devam eder.
#ekil 2. Tam bir turluk salınım hareketi
3
Period !u !ekilde ifade edilebilir:
(3)
Yaya asılan de"i!ik kütleler için periodun ölçülmesi yay sabitini hesaplamamızı sa"layabilir.
Bu yöntem, yay sabitini hesaplayabilece"iniz ikinci yöntemdir. Hesapladı"ınız bu k de"erini
ilk yöntem sonucunda ula!tı"ınız k de"eri ile kar!ıla!tırınız.
ARAÇLAR:
! Yay
! Sensör (fotogate sistem)
! Çe!itli a"ırlıklar
DENEY!N YAPILI"I:
1. Yöntem:
1. Kütle-yay sitemini kurmak için yayı sabit bir noktaya asın. Yayın alt ucuna kütle tutucuyu
yerle!tirin ve bu sistemin denge konumunu belirleyin. Bu de"eri
olarak tabloya
kaydedin.
2. Kütle tutucuya 100 g’lık bir a"ırlık yerle!tirin ve bu yeni kütle-yay sisteminin denge
konumunu belirleyin. Bu de"eri de
olarak tabloya kaydedin.
3. Kütle tutucuya 10 g daha ekleyerek toplam kütleyi 110 g’a çıkarın. Yine kütle-yay
sisteminin denge konumunu belirleyerek
olarak tabloya kaydedin. Aynı !ekilde a"ırlı"ı
10’ar gram arttırarak her seferindeki denge konumlarını kaydedin.
4. Tablodan yararlanarak
grafi"ini olu!turun. Grafi"inizin düz bir çizgi halinde
çıkması gerekmektedir. Bu çizginin e"imi bize kullandı"ımız yayın yay sabitini (k) verir.
2. Yöntem:
1. Kütle-yay sitemini kurun ve kütle tutucuyu yerle!tirin.
4
2. !ekil 2. de anlatıldı"ı gibi önce 100g’lık kütleyi kütle tutucuya yerle#tirip bu sistemin
denge konumunu belirleyin ve 100g’lık kütle takılı olan sistemin belirledi"iniz denge
konumuna bir sayaç yerle#tirin.
3. !imdi 100g’lık kütleyi sitemden ayırıp yay-kütle tutucu sistemini serbest bırakın. yaykütle tutucu sisteminin denge konumunu bozmadan 100g’lık a"ırlı"ı kütle tutucuya
yava#ça yerle#tirip serbest bırakın. Bunu yaparken yay-kütle tutucu sisteminin denge
konumunu bozmadan yerle#tirdi"imiz kütleyi yerçekimi kuvvetinin etkisi ile hareket
edecek #ekilde serbest bırakmalıyız.
4. 100g’lık a"ırlı"ın sa"ladı"ı salınım hareketinin peryodunu ölçebilmek için 2 dakikada kaç
kez geçti"ini sayaç yardımı ile ölçün. $ki geçi# arasındaki zaman farkını hesaplayın. Bu
zaman size T/4’ü verir.
5. 1. yöntemde ki gibi a"ırlı"ı 10’ar gram arttırarak bu i#lemi tekrarlayın.
6.
denklemini kullanarak yay sabitini hesaplayın.
7. Hesapladı"ınız bu yay sabiti Hooke Yasasına uyuyor mu? $nceleyin.
5
DENEY RAPORU:
Ad Soyad:…………………….
No:……………………………
Bölüm:………………………..
Tarih:………………………….
1. Yöntem:
m
x
0
=
100g
110g
120g
130g
140g
150g
=
=
=
=
=
=
grafi!i
6
2. Yöntem:
m
100g
110g
120g
130g
140g
150g
T
=
=
=
=
=
=
m
100g
110g
120g
130g
140g
150g
k
7
SERBEST DÜ!ME
SERBEST DÜ!ME DENEY":
AMAÇ:
1. Cisimlerin yerin merkezine do!ru hareket etmesini sa!layan bir çekim kuvveti
oldu!unun açıklanması ve gözlenmesi.
2. Yer çekimi kuvvetinin etkisi ile cisimlerin ivmeli hareket yaptıklarının incelenmesi.
3. Dü"en cisimlere yerçekimi kuvveti dı"ında da kuvvetlerin etki etti!inin kavranması.
4. Yer çekimi ivmesinin hesaplanması.
GENEL B"LG"LER:
E!er bir cismin hızı zamanla de!i"iyorsa o cisim ivmeli hareket yapıyor denir. Cismin #t
süresinde sahip oldu!u ortalama ivme a"a!ıdaki ba!ıntı ile hesaplanabilir.
(1)
Burada cismin t1 ve t2 anlarındaki hızı v1 ve v2 ile gösterilmi"tir. Cismin sahip oldu!u anlık
ivme ise hızın türevidir:
(2)
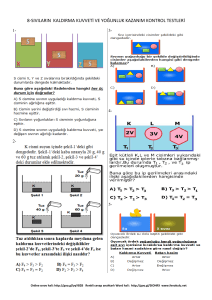
Serbest dü"me etkisindeki bir cisim;
a = g = 9,8 m/s2'lik ivme ile
hızlanmaya devam eder.
Yandaki "ekilde ilk hızsız serbest
dü"meye bırakılan bir cisim ve
üzerine etki eden yerçekimi kuvveti
gösterilmektedir.
Bunun sonucu olarak bütün cisimler serbest bırakıldı!ında sabit bir çizgisel ivme ile dü"erler.
Bu ivmenin büyüklü!ü 9,8 m/s2 dir ve g ile gösterilir. Bu olaya da serbest dü"me denir.
1
Ancak serbest dü"me yalnızca özel durumlar için geçerlidir.
E!er bir elma ile bir ku"tüyünü belirli bir yükseklikten aynı
anda serbest bırakırsak elma yere çok daha erken dü"er. Dü"en
cisimleri yerçekimi kuvveti dı"ında etkileyen ba"ka bir kuvvet
daha vardır. Bu kuvvet, cisimlere kesit alanlarıyla orantılı
olarak etki eden hava sürtünme kuvvetidir. Örne!in elimizde
a!ırlıkları e"it olan fakat kesit alanları farklı bir plastik top ile
bir demir bilye oldu!unu dü"ünelim. Plastik top demir bilyeye
oranla çok daha büyük olsun. A!ırlıkları e"it bu iki cismi,
belirli bir yükseklikten, aynı anda bıraktı!ımızda demir bilye
daha çabuk a"a!ı dü"er. Çünkü plastik topun kesit alanı demir
bilyeye göre çok daha fazla oldu!undan hava sürtünme
kuvveti plastik topa daha fazla etki eder ve dü"me süresi uzar.
E!er bu deney havası alınmı" bir ortamda yapılmı" olsa idi tüy ile elmanın aynı anda yere
dü"tü!ü gözlenirdi.
Bu deneyimizde, farklı kütlelerde bilyeler kullanılacaktır. Kullanılan bilyelerin kesit alanları
hemen hemen aynı oldu!u için her birine etki eden hava sürtünmesini kabul edebiliriz. Bu
durumda aynı yükseklikten serbest dü"meye bırakılan ve kütleleri farklı olan cisimlerin yere
aynı süre içinde dü"tü!ünü gözlemleyece!iz. Çünkü serbest dü"en bir cisim g ivmesine sahip
oldu!u için t sürede:
(3)
kadar yol alır. Yukarıdaki ba!ıntıdan da açıkça görüldü!ü gibi yere dü"me süresi kütleden
ba!ımsızdır.
ARAÇLAR:
! Farklı a!ırlıklarda üç adet bilye
! Sensörler
! Bilye tutucu
! Kronometre
2
DENEY"N YAPILI!I:
1. Sensörleri hareket ettirerek, sensörler arası mesafeyi ayarlayın.
2. Kullanaca!ınız bilyeyi bilye tutucuya yerle"tirin.
3.
Serbest dü"me dü!mesine basarak hareketi ba"latın.
4. Bilye alttaki sensörden geçtikten sonra sensörler arası mesafeyi ve bu mesafeyi ne kadar
sürede kat etti!ini kronometreden okuyarak deney raporunuza kaydedin.
NOT: En do!ru sonucu elde etmek için bu süre ölçümünü birkaç tekrarlayıp sonuçta çıkan
sürelerin birbirlerine yakın olanlarının ortalanmasını alın. Yani t1=2,877 ; t2=2,883 ;
t3=2,875 iken ; t4=3,136 çıkıyorsa t4’ü göz ardı edip di!er üç zamanın ortalamasını
almalısınız.
5. Aynı bilyeyi kullanarak deneyi de!i"ik yükseklikler için tekrarlayın ve sonuçlarınızı
raporunuzdaki Tablo 1.’e kaydedin.
6. Deney sonuçlarından olu"turdu!unuz tabloyu kullanarak yüksekli!in zaman göre (h-t)
grafi!ini ve yüksekli!in zamanın karesine göre (h-t2) grafi!ini çizin.
NOT: x-t2 grafi!i bir do!ru olmalıdır. Bu do!runun e!imi bize o cismin ivmesinin yarısını
verir.
7.
$imdi deneyinizi farklı bilyeler için tekrarlayarak yeni grafiklerinizi çizin.
8. Farklı a!ırlıktaki bilyelerin serbest dü"me hareketlerini kar"ıla"tırın.
3
DENEY RAPORU:
$G6R\DG««««««««
DENEY RAPORU:
DENEY RAPORU:
Ad Soyad:…………………….
1R«««««««««««
No:……………………………
%|OP«««««««««
7DULK««««««««««
Bölüm:………………………..
gOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUgOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHU
Tarih:………………………….
<NVHNOLN
Zaman
t2
<NVHNOLN
gOoP
h1 «««FP
t1 «««V
2
tgOoP
«««
1
h1 «««FP
Yükseklik
gOoP
Zaman
h2 «««FP
2 2
t2 «««V t tgOoP
«««
2
h2 «««FP
Tablo 1. 1.bilye kullanılarak alınan ölçümler.
1. Ölçüm
3. gOoP
h1=………cm
h3 t1«««FP
=………s
2
t3 «««V
t3.
«««
3 gOoP
t12 =………
h3 «««FP
2. Ölçüm
gOoP
h2=………cm
h4 t «««FP
=………s
2
t4 «««V
tgOoP
«««
4
t22 =………
h4 «««FP
3. Ölçüm
h3=………cm
gOoP
4. Ölçüm
h4=………cm
2
t3 =………s
h5 «««FP
t 2 «««
gOoP
5
t32 =………
t5 «««V
h5 «««FP
2
t4 =………s
t4 =………
Grafikler:
m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOHQJUDILNOHU
5. Ölçüm
h =………cm
t Grafikler:
=………sm1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOH
t 2 =………
5
5
5
22
x-WJUDIL÷L
x-t
JUDIL÷L
x-t
grafi!i
x-WJUDIL÷L
x-t
grafi!i
Hesaplamalar:
Hesaplamalar:
x-t2 JUDIL÷LQLQH÷LPL
x-t2 JUDIL÷LQLQH÷LPL
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.rentech.com.tr
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.
4
%|OP«««««««««
7DULK««««««««««
gOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUgOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHU
<NVHNOLN
Zaman
t2
<NVHNOLN
gOoP
h1 «««FP
t1 «««V
2
tgOoP
«««
1
h1 «««FP
Yükseklik
gOoP
Zaman
h2 «««FP
2 2
t2 «««V t tgOoP
«««
2
h2 «««FP
Tablo 1. 2.bilye kullanılarak alınan ölçümler.
1. Ölçüm
3. gOoP
h1=………cm
h3 t1«««FP
=………s
2
t3 «««V
t3.
«««
3 gOoP
t12 =………
h3 «««FP
2. Ölçüm
gOoP
h2=………cm
h4 t «««FP
=………s
2
t4 «««V
tgOoP
«««
4
t 2 =………
h4 «««FP
3. Ölçüm
h3=………cm
t3 =………s
t5 «««
t32 =………
4. Ölçüm
h4=………cm
2
2
2
gOoP
h5 «««FP
t5 «««V
gOoP
h5 «««FP
t42 =………
t4 =………s
Grafikler:
m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOHQJUDILNOHU
5. Ölçüm
h =………cm
t Grafikler:
=………sm1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOH
t 2 =………
5
5
5
22
x-WJUDIL÷L
x-t
JUDIL÷L
x-t
grafi!i
x-WJUDIL÷L
x-t
grafi!i
Hesaplamalar:
Hesaplamalar:
x-t2 JUDIL÷LQLQH÷LPL
x-t2 JUDIL÷LQLQH÷LPL
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.rentech.com.tr
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.
5
%|OP«««««««««
7DULK««««««««««
gOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUgOoPOHU m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHU
<NVHNOLN
Zaman
t2
<NVHNOLN
gOoP
h1 «««FP
t1 «««V
2
tgOoP
«««
1
h1 «««FP
Yükseklik
gOoP
Zaman
h2 «««FP
2 2
t2 «««V t tgOoP
«««
2
h2 «««FP
Tablo 1. 3.bilye kullanılarak alınan ölçümler.
1. Ölçüm
3. gOoP
h1=………cm
h3 t1«««FP
=………s
2
t3 «««V
t3.
«««
3 gOoP
t12 =………
h3 «««FP
2. Ölçüm
gOoP
h2=………cm
h4 t «««FP
=………s
2
t4 «««V
tgOoP
«««
4
t 2 =………
h4 «««FP
3. Ölçüm
h3=………cm
t3 =………s
t5 «««
t32 =………
4. Ölçüm
h4=………cm
2
2
2
gOoP
h5 «««FP
t5 «««V
gOoP
h5 «««FP
t42 =………
t4 =………s
Grafikler:
m1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOHQJUDILNOHU
5. Ölçüm
h =………cm
t Grafikler:
=………sm1 ve m2 NWOHOHULLOH\DSÕODQ|OoPOHUGHQHOGHHGLOH
t 2 =………
5
5
5
22
x-WJUDIL÷L
x-t
JUDIL÷L
x-t
grafi!i
x-WJUDIL÷L
x-t
grafi!i
Hesaplamalar:
Hesaplamalar:
x-t2 JUDIL÷LQLQH÷LPL
x-t2 JUDIL÷LQLQH÷LPL
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.rentech.com.tr
5(1.2/WGùWL)L]LN'HQH\6HWOHULYH2\XQODUÕhttp://www.
6