YİBO Öğretmenleri (Fen ve Teknoloji-Fizik, Kimya, Biyoloji- ve Matematik)
Proje Danışmanlığı Eğitimi Çalıştayı
Fizik
MANYETİK MANİPÜLATÖR İLE YAPAY KAS
TASARIMI
Grup Uludağ
Ersen ÇIĞRIK Eleşkirt Y.İ.B.O (Eleşkirt – Ağrı)
PROJE DANIŞMANLARI
Prof. Dr. Bekir AKTAŞ
Prof. Dr. Yaşar YILMAZ
MANYETİK MANİPÜLATÖR
İLE YAPAY KAS TASARIMI
PROJENİN AMACI
Manipülatörler robotik eklemlerde hareketi sağlayan sistemlerdir.
Mevcut manipülatör sistemlerin bazı durumlarda yetersiz
kalması ve organik kas mekaniğine uygun hareket gereksinimi
alternatif manipülatörlerin geliştirilmesini gerektirmektedir.
Bu araştırmada amaç kas hareketlerinin benzeri şekilde kasılıp
gevşeme hareketi sağlayacak bir manipülatör sistemi
geliştirmektir.
Bu hareketi sağlamak
yararlanılmıştır.
için
elektro
manyetik
etkiden
GİRİŞ
Günümüzde teknolojinin robotik uygulamaları sanayi, savunma
ve eğlence amaçlı olarak birçok farklı alanda kullanılmaktadır.
Konunun çok geniş perspektife sahip olması robotik
uygulamaların her bir alt dalının farklı bir araştırma konusu
haline gelmesine sebep olmuştur.
Günümüzde yapılan çalışmalarda bu alt araştırma konuları
genel olarak;
kullanıcı-robot ara yüzleri,
denetim-karar blokları,
hareket blokları olarak gruplandırılmaktadır.
GİRİŞ
Hareket bloklarının geliştirilmesi için yapılan araştırmalarda
farklı çalışma sistemleri geliştirilmiştir. Araştırmacıların
geliştirmiş oldukları farklı yapılı robot eklem uygulamaları Tablo
1. de görülmektedir [1].
Tablo 1. Farklı Hareketlendirici Tiplerine Sahip Robotik Eklemler
ÖZELLİK
ROBOT EL
Hareketlendiri
ci Tipi
Parmak Sayısı
Başparmak
Eklemi
Toplam Ser.
Derecesi
Hareket İletimi
UTAH/MIT
Pnömatik
4
4
16
Makara - İp
Belgrad/ USC
Model II
Elektrik
5
2
16
Özel
Mekanizma
JPL Standford
Elektrik
3
3
9
Makara - İp
METUHAND
Elektrik
3
3
9
Makara - İp
MAT)ODTÜ
Pnömatik
4
2
4
Makara - İp
SMA Hand
Elektrik
3
Şekil Bellek
Etkisi
Özel Yapı
Isıtmasoğutma
GİRİŞ
Elektrik motorlarının kullanılma nedeni olarak ise, motorun
dönüş eksenine göre bir moment oluşturması ve kol belli bir
noktaya geldikten sonra motor frenlenerek hareketin durması
sağlanması görülebilir.
Bununla birlikte küçük boyutlara inildikçe bu motorların
küçültülmesi zorlaşmaktadır ve motorun oluşturacağı tork de
buna bağlı olarak azalacaktır. DC motorlarının bir özelliği de
motor momentinin, devir sayısı arttıkça düşmesi ve böylece
motor gücünün takriben sabit kalmasıdır [2].
Ayrıca elektrik motorları ile çalışan eklem sistemlerinde ses
kirliliği ve motorun verimine bağlı olarak ta aşınımlar meydana
gelebilmektedir.
GİRİŞ
Robotik eklemlerde kullanılan diğer bir manipülatör ise hidrolik
kuvvettir.
Hidrolik sürücüler yüksek burulma momentlerinde hızlı hareket
beklenildiği durumlarda, yüksek güç ihtiyaçlarının fazla olduğu,
azda olsa yağ kaçağının kabul edilebileceği yerlerde kullanılır
[2]. Bu da küçük boyutlarda yapılacak sistemlerde kullanılmasını
verimli kılmaz.
GİRİŞ
Geliştirilen sistemler giderek canlı organizmalara benzer şekilde
tasarlanmaktadır. Günümüzde insansı robotların tasarımı
yaygınlaşmaktadır. Canlılık özelliklerini taklit etmek robot
sistemlerinde gelişmişliğin bir göstergesi olarak görülmektedir.
Uygulamaya bağlı olarak çok değişik tipte robot manipülatörleri
tasarlanmaktadır, ancak robotun kol şekli kadar önemli olan bir
nokta da, robota istenen hareketi en az hata ile yaptırabilecek
olan kontrolörün tasarlanmasıdır [3]. “İnsansı robot”
araştırmaları için kasılıp gevşeme özelliğine sahip bir
manipülatör gerçekleştirme ihtiyacı ortaya çıkmaktadır.
Bu araştırmada amaç kas hareketlerinin benzeri şekilde kasılıp
gevşeme hareketi sağlayacak bir manipülatör sistemi
geliştirmektir.
YÖNTEM
Şekilde tek eksen üzerinde hareketi sağlayan manyetik
manipülator sistemi görülmektedir.
YÖNTEM
Manyetik manipülatörün çalışma sistemi
YÖNTEM
Manyetik Manipülatör Tasarımın Son Hali
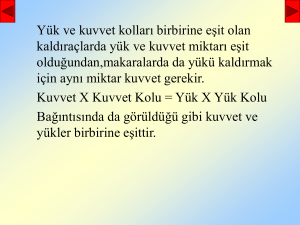
BULGULAR
İlk olarak oluşturduğumuz manyetik kuvvetin ne kadar olduğunu
ve bu kuvvet ile ön kolda bulunan yükün uyguladığı kuvvetin
oranı hesaplanmıştır.
22 cm
F
1,5 cm
8 cm
K=5,83 g
Ön kol kemiği ağırlığı (K) hassas terazi ile ölçülmüştür. Uzunluklar ise cetvel ile
ölçülmüştür. Aşağıdaki hesaplamalar yapılmıştır.
F . 1,5 cm = K . 8. cm
F . 1,5 cm = 58,3 N . 8 cm
F = 311 N
BULGULAR
Eklemdeki açı değişikliğini hesaplamak için bir referans noktası
seçilmiş ve bu noktanın uzaklıkları kas gevşek ve kasılı
durumlardayken cetvel ile ölçülmüştür.
7 cm
α
8,5 cm
ß
15 cm
15 cm
Şekil 5 Ön Koldaki Referans Noktasının Kas
Gevşek Haldeyken Konumu
Şekil 6 Ön Koldaki Referans Noktasının Kas
Kasılı Haldeyken Konumu
Tan ß = 0,56
ß = 30°
Tanα = 0,46
α = 25°
Kasılıp gevşeme açısı arasındaki fark;
ß- α = 30° – 25° = 5°
BULGULAR
Manipülatör sisteminin tepki süresi hesaplamalarında ise
kasılma süresinin 1 s, gevşeme süresinin ise 2 s olduğu
ölçülmüştür.
Son olarak ise sistemin tork hesaplamaları yapılmıştır.
tork = kuvvet . mesafe
tork = 311 N . 0,015 m
tork = 4,65 N.m
SONUÇ VE TARTIŞMA
Yapılan deneylerde hazırlanan bobin ve mıknatıs ile 311 N’ luk
bir kuvvet oluşturulmuştur. Oluşturulan bu kuvvet ile 58 N’ luk bir
ön kol kemiğine 5° lik bir açı yaptırılmıştır. Bu bulgular
manipülator
sisteminin
istenilen
düzeyde
çalıştığını
göstermektedir.
Eklemde oluşturduğumuz açı farkı manyetik kuvveti ile doğru
orantılıdır. Manyetik kuvveti arttırmak için bobindeki sarım
sayısını veya bobinden geçen akım mikktarını arttırdığımız
zaman oluşacak açı farkıda artacaktır.
Değişken dirençlerle bobinden geçen akım şiddeti değiştirildiği
zaman eklemin istenilen açıyı alması sağlanacaktır.
Bu da
robot kolun çok hassas hareketler yapmasına imkan
tanıyacaktır.
SONUÇ VE TARTIŞMA
Tasarlandığımız sistemin önemli özelliklerinden biride sessiz
çalışmasıdır. DC motorlar ile oluşturulan manipülatör
sistemlerde motor hareketine ve motorun frenlemesine bağlı
olarak bir miktar gürültü oluşmaktadır. Bu da robot sistemlerinin
çalışırken gürültü kirliliği oluşturmasına neden olmaktadır.
Tasarladığımız sistem ile gürültü kirliliğininde önüne geçilmiş
olacaktır.
Tasarladığımız manyetik manipülatör ile kasın kasılma
süresi 1 s, gevşeme süresi ise 2 s olarak hesaplanmıştır. Kasın
gevşemesi için yerçekimi kuvvetinden yararlanılmıştır. Böylece
gevşeme için enerji harcanmayacak ve enerji rasarrufu
sağlanacaktır.
Robot kolun torku 4, 65 N. m olarak hesaplanmıştır.
Torkun artması daha fazla yük taşıması anlamına gelmektedir.
KAYNAKLAR
[1] Savaş, D., Ertan G. (2000) Üç Parmaklı Şekil Bellek Alaşımlı
(Sma) Robot Elin Yapımı Ve Uygulama Analizi,
Deü
Mühendislik Fakültesi Fen Ve Mühendislik Dergisi Cilt:2 Sayı:1
[2] Türkeş E., Orak S. (2008) Takım Tezgahı Tasarımında
Elektrik Motoru Seçimi, Dumlupınar Üniversitesi Fen Bilimleri
Enstitüsü Dergisi, sy. 17
[3] Yamaçlı H., Canpolat S. (2007) Bir SCARA Robotun
Adaptif/Öğrenme ve PD Denetleyiciler ile Kontrolünde Konum
İzleme Performanslarının Karşılaştırılması. Elektrik-ElektronikBilgisayar Mühendisliği 12. Ulusal Kongresi ve Fuarı.
TEŞEKKÜRLER