SICAKLIĞIN CER MOTORLARINDAKİ STATOR SARGI
advertisement

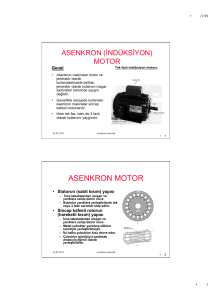
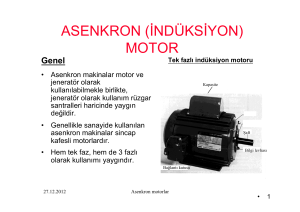
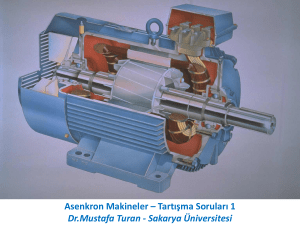
SICAKLIĞIN CER MOTORLARINDAKİ STATOR SARGI DİRENCİNİDEKİ KAYIPLARA ETKİSİ Mine Sertsöz, Mehmet Fidan ÖZET Türkiye’de elektrik yükü kullanımının yaklaşık %40’ı asenkron motorlar tarafından yapılmaktadır. Hatta endüstri kuruluşlarının kullandığı yük durumuna bakıldığında bu oran %80’lere kadar çıkmaktadır. Bu durumda asenkron motorların verimlerinde yapılacak iyileştirmeler enerji verimliliğine büyük katkı sağlayacağı açıkça görülmektedir. Asenkron motorlarda da diğer elektrik makinalarında olduğu gibi demir, bakır ve sürtünme vantilasyon kayıpları mevcuttur. Bu çalışmada Marmaray’da kullanılan, tipi Sincap Kafesli Asenkron Motor olan Cer Motoru kullanılmış ve boşta çalışmada kayıp değeri 5.3 kW olarak ölçülmüştür. Bu deneyde rotorun demir ve bakır kayıpları ihmal edilebilecek kadar küçüktür. Normal şebeke gerilimi altında boşta çalışan asenkron motorun stator sargılarından geçen akımlar bu sargılarda bakır kayıplarına sebep olur. Bir diğer testte ise stator sargı direnci 28º C'de ölçülmüş ve diğer değerler formülize edilerek hesaplanmıştır. Sonuçlarda her 25º C artışta direnç değerinin yaklaşık 1.09-1.07 kat arttığı görülmüştür. Bu çalışma, enerji kaybını azaltmak için stator sargı direnç sıcaklığının önemini göstermektedir. ABSTRACT Approximately 40% of the electric charge is carried out by induction motors used in Turkey. Even when we look at the loads used by industry organizations this rate rises to 80 %. In this case the improvements making in the efficiency of an induction motor is evident that contribute to greater energy efficiency. In asynchronous motors as well as in other electrical machine, there are iron, copper, friction and ventilation losses. In this study, traction engine which is squirrel cage induction motor in Marmaray is used. Lost value is measured as 5.3 kW in no-load in the test. This value indicates that copper losses caused by stator winding resistance if rotor’s iron and copper losses are omitted because of value is less. In another test the stator winding resistance measured at 25º C and the other values are calculated in closed form. Results demonstrated that resistance value increases approximately 1.09-1.07 times at each 25º C increase. This study aims to demonstrate the importance of the stator winding resistance in order to reduce the loss of temperature for to reduce the energy losses. 1. ASENKRON MOTORLAR Şekil 1. Asenkron Motor Görünüşü Endüstride ve sanayi kuruluşlarında kullanılmakta olan en sağlam, en az arıza veren ve en ucuz olan motorlar asenkron motorlardır. Asenkron motorlara (ASM) indüksiyon motorları adı da verilmektedir. Senkron motorlardan farkı sabit hızda dönmemeleridir ve bu hız senkron hızdan daha azdır. ASM’ler bir, iki, üç ve çok fazlı olarak imal edilirler. ASM’ler mesken veya sanayi kuruluşlarında yaygın olarak kullanılmaktadır. 3 fazlı, 2 kutuplu bir asenkron motora şebeke gerilimi uygulandığında, statordaki sargılardan geçen alternatif akımlar, 3 fazlı döner alanları meydana getirirler. Stator sabit olduğu halde, döner alanlar ortada bulunan kısa devreli rotorun çubuklarını kestiğinden, rotorun çubuklarından endüksiyon akımlarının geçmesine neden olurlar. Bu endüksiyon akımları rotorun kutup alanlarını meydana getirirler. Döner stator kutup alanları rotorun kutuplarını etkileyerek (benzer kutuplar birbirini iter, zıt kutuplar birbirini çeker prensibinden hareket ile) N kutbunun altındaki rotor çubukları bir yöne, S kutbunun altındaki rotor çubukları diğer yöne doğru iterler. Bu itme kuvvetlerinin meydana getirdiği döndürme momenti rotorun döner alan yönünde dönmesini sağlar. Rotorun devir sayısı arttıkça, döner alanın rotor çubuklarını kesmesi azalacağından, rotor çubuklarında endüklenen emk’ler ve kısa devre çubuklarından geçen endüksiyon akımları azalır. Dolayısıyla, rotoru döndüren moment azalır. Böylece rotorun devir sayısında artış olmaz. Motor boşta çalışırken rotorun devir sayısı senkron devir sayısına (döner alanın devrine) yaklaşır ama hiçbir zaman eşit olamaz. Çünkü bu iki devir sayısı eşit olursa, stator döner alanı rotor çubuklarını kesmez. Bu da rotorda döndürme momentini oluşturan endüksiyon akımının geçmemesine neden olur. Böylece rotorun kutup alanları oluşmaz ve rotor dönmez. Bu yüzden motorun momentini belirlemede etkili olan kayma kavramı ortaya çıkmıştır. Döner alanın devir sayısı ile rotor devir sayısı arasındaki farka “Rotorun Kayması” denilmektedir. Diğer bir ifade ile, rotor devrinin senkron devirden geri kalmasına “Kayma” denilmektedir. Kayma 𝑛𝑠 − 𝑛𝑟 . 100 𝑛𝑠 𝑛𝑟 = (1 − 𝑠)𝑛𝑠 %𝑠 = Şeklinde ifade edilmektir. Burada: s=Kayma, ns=Senkron hız [d/d] nr=Rotor hızı [d/d] 2. ASENKRON MOTORLARDA KAYIPLAR Genel olarak, bütün elektrik makinelerinde olduğu gibi, asenkron makinelerde de çeşitli kayıplar meydana gelir. Bunlar: • • • Demir kayıpları Bakır kayıpları Rüzgâr ve sürtünme kayıpları 2.1. Demir Kayıpları Demir kayıpları; stator ve rotor saçlarında meydana gelen histerezis ve fuko kayıplarıdır. Bu kayıplar, frekans ve manyetik endüksiyon ile oranlıdır. Stator demir kayıpları, stator frekansı sabit olduğuna göre değişmemektedir. Yalnız rotor demir kayıpları, rotor frekansı ile değişir. Ancak boş ve yüklü çalışmada, rotor frekansı çok küçüktür. Bu sebeple rotor demir kayıpları çok küçük olur ve ihmal edilebilir. O halde, bir asenkron motorun demir kayıpları, stator demir kayıplarına eşittir denebilir. Stator frekansı sabit olduğundan, demir kayıpları da bütün yükler için sabittir. 2.2. Bakır Kayıpları Asenkron motorlarda, stator ve rotor omik dirençlerinden dolayı değerinde bakır kayıpları meydana gelir. Bakır kayıpları; sargı dirençleri sabit olduğuna göre, yük akımları ‘nin karesi ile değişir. Şu halde bu kayıplar yükle değişen kayıplardır. Rotor ve stator bakır kayıplarını bulabilmek için; akım ve dirençlerin bilinmesi gerekir. Genel olarak bakır kayıpları, motorun kısa devre deneyinden tüm olarak hesaplanır. 2.3. Rüzgâr ve Sürtünme Kayıpları Asenkron motorlarda sürtünme ve rüzgâr kayıpları devir sayısı ile biraz değişirse de bu değişim çok az olduğu için sabit kabul edilebilir. Sürtünme ve rüzgâr kayıpları; boş çalışma deneyinde, demir kayıpları ile birlikte bulunur. Demir kayıpları ile rüzgâr ve sürtünme kayıplarına sabit kayıplar denir. 3. KAYIPLARIN BULUNMASINDA YAPILAN DENEYLER Üç fazlı asenkron motorun kayıplarının bulunmasında en iyi bilinen yöntem boşta çalışma ve kısa devre deneyleri kullanılarak hesaplanmasıdır. Bu metot ile hesaplanan parametreler sabittir[1]. 3.1. Boşta çalışma deneyi: Normal frekanslı, şebeke gerilimi altında çalışan asenkron motorun şebekeden çektiği güç, stator demir kayıpları ile sürtünme ve rüzgâr kayıplarının toplamını verir. Boşta çalışan motorun devir sayısı döner alanın devrine yakın (kayma çok küçük) olduğundan, rotorun demir ve bakır kayıpları oldukça küçüktür. Normal şebeke gerilimi altında boşta çalışan asenkron motorun stator sargılarından geçen akımlar bu sargılarda (Io2R1) watt bakır kayıplarına neden olur. Bu kayıplar bulunduktan sonra motorun şebekeden çektiği güçten çıkarılırsa, geriye kalan güç stator demir kayıpları ile sürtünme ve rüzgâr kayıplarının toplamını verir. Şekil 2’de Asenkron motorun boşta çalışma deneyi bağlantı şeması gösterilmiştir. Şekil 2. Asenkron motorun boşta çalışma deneyi bağlantı şeması 3.2. Kısa devre çalışma deneyi: Asenkron motorun kısa devre deneyi, transformatörün kısa devre deneyine benzer. Çünkü rotoru kilitli bir asenkron motor sekonderi kısa devre edilmiş bir transformatör gibidir.(s=1) Şekil 2’deki gibi bir motor bağlantısı yapılır. Oto transformatör ile motora uygulanan gerilim sıfırdan başlanarak kademe kademe artırılır. Motorun çektiği akım, motorun etiketinde yazılan normal akım değerine ulaşıncaya kadar geriliminim artırılmasına devam edilir. Motorun normal akımına eşit kısa devre akımının geçmesine sebep olan Uk kısa devre gerilim, normal gerilimin %20-%35 i civarındadır. Bu arada motorun çektiği güç Pk, kısa devre gücü bakır kayıplarını verir. Kilitli rotorda sürtünme ve rüzgâr kayıpları, rotor dönmediği için sıfırdır. Motora uygulanan gerilimin düşük olması ve rotor manyetik alanın hava aralığındaki manyetik akıyı zayıflatması gibi sebeplerden dolayı motordaki demir kayıpları ihmal edilebilir. Şekil 3’de Asenkron motorun kısa devre çalışma deneyi bağlantı şeması gösterilmiştir. Şekil 3. Asenkron motorun kısa devre çalışma deneyi bağlantı şeması Bu çalışmada Boşta çalışma deneyinden faydalanılacaktır. 4. LİTERATÜR İNCELEMESİ Fernandez ve diğ., asimetrik güç kaynağı ile beslenen üç fazlı sincap kafesli asenkron motorun ısıl performansını incelemişlerdir [2]. Lee ve diğ., gerilim kaynaklı girdap akım problemlerini çözerek dağıtılmış ısı kaynaklarını hesaplamışlardır. Sonlu elemanlar yönteminde ısı kaynakları ve sıcaklık dağılımının iyi sonuçlar verdiğini göstermişlerdir [3]. Bastos ve diğ., asenkron makinayı ısıl olarak değerlendirmek yerine, geçici durumları da hesaba katabilmek amacıyla, elektriksel ve ısıl olguyu birleştirmeyi amaçlamışlardır. Bu sayede, ısıl inceleme için hava aralığını da hesaba katan yeni bir yaklaşım oluşturmuşlardır [4]. Huai ve diğ., asenkron motorlarda kayıpların hesabı ve ısıl olgunun tanımlanması için deneysel olarak bir model geliştirmişler ve güncellemişlerdir. Oluşturdukları modeli sıcaklık artışının tahmini için TEFC asenkron motora uygulamışlardır [5]. Asenkron makina modelinde, enerji dengesi ve noktalar arası iletim ve taşınım ısı aktarımını temsil eden uygun nokta etkileşim ifadeleri, aynı zamanda her bir nokta için ısı kapasite ifadeleri geliştirmişlerdir [6]. Bottauscio ve diğ., farklı teorik demir kayıpları hesap yöntemlerini, eş-zamanlı sonlu elemanlar hesaplarını ve malzeme modellerini karşılaştıran bir çözümleme yapmıştır. Karşılaştırma modelini bir asenkron motor üzerine uygulamıştır ve sonuçları karşılaştırmıştır [7]. Salman E., üzerinden akım geçen stator sargıları ve rotor kafes çubukları birer ısı kaynağı olarak modellenmiştir. Yapılan benzetim sonucunda elde edilen veriler ile deneysel çalışma sonucu elde edilen sıcaklık verileri karşılaştırıldığı zaman stator sargı sıcaklığının büyük bir doğrulukla hesaplandığı görülmektedir. [8] 5. YAPILAN DENEYLER Tablo 1. Stator Sargı Direnci [9] Direnç U-V (Ω) V-W (Ω) W-U (Ω) Referans Değeri 28 ºC 150 ºC 0.1679 0.2458 0.1679 0.2458 0.1685 0.2467 GEÇTİ 0.2453Ω±10% Güç (kW) 5.3 Açıklama GEÇTİ Tablo 2. Yüksüz Karakteristik Testi [9] Gerilim (V) 1369 Frekans (hz) 66 Akım (A) 53.5 Yukarıda verilen Tablo 1’de direnç değeri 28 ºC’de ölçülerek bulunmuştur. 150 ºC’de ise aşağıda verilen formül ile bulunmuştur: Rson = 234.5+Tson 234.5+Tilk Rilk (1) Bu formül kullanılarak: Direnç 28 ºC 53 ºC 78 ºC 103 ºC 128 ºC 153 ºC U-V (Ω) 0.1679 0.1838 0.1998 0.2158 0.2318 0.2478 V-W (Ω) 0.1679 0.1838 0.1998 0.2158 0.2318 0.2478 W-U (Ω) 0.1685 0.1845 0.2005 0.2166 0.2326 0.2487 6. SONUÇ Kayıp değerlerinin artan direnç değeri ile doğrusal olarak arttığı düşünülürse kayıp güç değerinin de her 25ºC artışta 1.09-1.07 kat arasında artacağı aşikârdır. Bu durumda 153ºC ‘deki direnç değerinin normal şartlar olarak kabul edebileceğimiz 28ºC’deki çalışma sıcaklığındaki direnç değerinin 1,47 kat artacağı yapılan hesaplamalar sonucunda görülmüştür. Bu değer normal olarak engellenemez kayıp olarak kabul edilen 5.3 kW değerine ek 2.5 kW bir kayıp demektir. Bu kayıp değeri oldukça yüksek bir değer olup bu neredeyse bir evin elektrik ihtiyacını karşılamaktadır. Tek bir motorun tek bir sefer çalıştırılması ile bu denli bir kayıp sanayideki tüm motorlar göz önüne alındığında devasa bir kayba işaret etmektedir. Bu sebeple bu çalışmada yapılan gerek deneysel gerekse teorik sonuçlar asenkron motorlardaki sıcaklığa bağlı kayıpları önlemek için önlemler alınması gerektiğinin açık bir ispatıdır. Bu çalışma sadece stator sargılarındaki kayıpların bile sıcaklıkla ne kadar etkilendiğini göstermek için yapılmıştır. KAYNAKLAR [1] Yetgin A.G., 2004 , Üç fazlı asenkron makina tasarımı ve sonlu elemanlar yöntemi ile analizi, Yüksek Lisans tezi, Dumlupınar Üniversitesi Fen Bilimleri Enstitüsü, 139s. [2] Fernandez, X. M. L., Coimbra, A. P., Pinto, J. A. D., Antunes, C. L. And Donsion, M. P., 1998, Thermal Analysis of an Induction Motor Fed by Unbalanced Power Supply Using a Cdmbined Finite Element Symmetrical Components Formulation, IEEE, 620-624. [3] Lee, Y., Lee, H. B. and Hahn, S. Y., 1997, Temperature Analysis of Induction Motor with Distributed Heat Sources by Finite Element Method, IEEE. [4] Bastos, J. P., Cabreria, M. F. R. R., Sadowski, N. and Arruda, S. R., 1997, A Thermal Analysis of Induction Motors Using a Weak Coupled Modeling, IEEE Transactins on Magnetics, Vol. 33, No. 2, 1714- 1717. TransactionsonMagnetics, Vol. 33, No. 2, 1718-1721. [5] Huai, Y., Melnik, R. V. N. and Thogersen, P. B., 2003, Computational Analysis of Temperature Rise Phenomena in Electric Induction Motors, Applied Thermal Engineering, No. 23, 779–795. [6] Jankovski, T. A., Prenger, F. C., Hill, D. D., O’Bryan, S. R., Sheth, K. K., Brookbank, E. B., Hunt, D. F. A. and Orrega, Y. A., 2010, Development and Validation of a Thermal Model for Electric Induction Motors, IEEE Transactions on Industrial Electronics, 1-12. [7] Bottauscio, O., Canova, A., Chiampi, M. and Repetto, M., 2002, Iron Losses in Electrical Machines: Influence of Different Material Models, IEEE Transactionson Magnetics, Vol. 38, No. 2, 805-808. [8] Salman E., Üç Fazlı Sincap Kafesli Asenkron Motorun Sıcaklık Dağılımının Çıkarılması, Yüksek Lisans Tezi, Ocak 2011. [9] Tülomsaş Rotem Cer Motor Test Föyü.