6th International Advanced Technologies Symposium (IATS’11), 16-18 May 2011, Elazığ, Turkey
Mikrodenetleyici Tabanlı İki Seviye DA/DA
Alçaltan Dönüştürücü
Ş. Demirbaş1 ,S. Bayhan2 ,İ. Garip3
1
Gazi Üniversitesi, Ankara/Türkiye, [email protected]
Gazi Üniversitesi, Ankara/Türkiye, [email protected]
2
Microcontroller Based Two Level DC/DC
Buck Converter
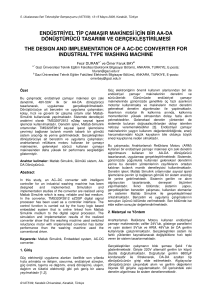
Abstract—This paper introduces design and application of
microcontroller based two level buck converter. Implemented
system consists of control and power circuit. While control circuit
includes PIC18F452 microcontroller, keypad, LCD and IGBT
driver, power circuit composed of two buck converter. Realized
two level buck converter circuit has 0-300 volt voltage range and
0-20 ampere current range. A PI controller has been used to
obtain constant output voltage at load changes. A separate excited
DC motor has been controlled using developed two level buck
converter. Experimental results show that implemented two level
buck converter does not affected from load changes and output
voltage remains constant during operation. As a result it can be
said that developed system is cost effective and reliable solution
for the loads needed two level voltage.
Keywords—Buck converter, microcontroller, PI controller.
I. GİRİŞ
İRÇOK endüstriyel uygulamada sabit DA gerilim değeri
yerine farklı seviyelerde DA gerilim değerine ihtiyaç
duyulmaktadır. Sabit DA gerilim seviyesini, farklı DA gerilim
seviyelerine dönüştürmek amacıyla DA/DA dönüştürücü devre
yapıları kullanılmaktadır. Giriş/çıkış gerilim değerlerine bağlı
olarak farklı DA/DA dönüştürücü devre yapıları
kullanılmaktadır. Dönüştürücü yapıları seçilirken ihtiyaç
duyulan çıkış gerilim değeri ile giriş gerilim değerinin
büyüklüğü önemlidir. Örneğin giriş gerilim değerine göre çıkış
gerilim değerinin yüksek olması istenen durumlarda yükselten
DA/DA dönüştürücü yapısı kullanılırken, çıkış gerilim
değerinin giriş gerilim değerine göre düşük olması gereken
durumlarda
alçaltan
DA/DA
dönüştürücü
yapısı
kullanılmaktadır.
DA/DA dönüştürücülerde, giriş geriliminin ve/veya yükün
değişmesi durumlarında çıkış gerilim seviyesinin istenen
değerde kalması istenir. Bunun için literatürde farklı denetim
teknikleri önerilmektedir[1-3]. Seçilen denetim tekniğinde
kullanılan matematiksel işlemlerin yoğunluğuna bağlı olarak
bazı çalışmalarda sayısal işaret işleyici (DSP), FPGA
kullanılırken bazı çalışmalarda ise mikrodenetleyici
kullanılmaktadır [4-6]. Mikrodenetleyicilerde çevresel
arabirimler, bir tümleşik aygıt içinde birleştirildiğinden sistem
hızının ve güvenilirliğinin arttığı, maliyetin azaldığı, kullanım
B
kolaylığı sağlanmakla birlikte karmaşık yapının ortadan
kaldırıldığı bilinmektedir. Mikrodenetleyicilerin bu özellikleri
dikkate alındığında; motor sürücüleri, DA/DA dönüştürücüler,
gibi
birçok
endüstriyel
uygulamada
kullanıldıkları
görülmektedir [7]. Literatürdeki bazı alçaltan DA/DA
dönüştürücü çalışmalarında, gerilim seviyesinin yüksek olması
ve anahtar üzerindeki stresi azaltmak için üç seviye alçaltan
dönüştürücü yapıları da kullanılmıştır. Bu çalışmalarda anahtar
sayıları arttığı için gerekli denetim yapısı zorlaşmakta, buna
karşı anahtarlamalar sıfır akım durumunda yapıldığı için
anahtarlar üzerindeki stresler azaltılmaktadır [8-10]. Yapılan
bu çalışmaların hepsi tek seviye çıkış gerilimi verecek şekilde
gerçekleştirilmiştir. Oysa yabancı uyartımlı DA motorları gibi
bazı uygulamalarda tek seviyeli DA yeterli olmamaktadır.
Uyartım ve endüvi devresi için farklı değerlerde iki gerilime
ihtiyaç duyulmaktadır.
Bu çalışmada birbirinden bağımsız çalışan, iki seviye
alçaltan dönüştürücü mikrodenetleyici tabanlı olarak
gerçekleştirilmiştir. Gerçekleştirilen sistem kontrol ve güç
devresi olmak üzere iki basamaktan oluşmaktadır. Kontrol
devresinde PIC18F452 mikrodenetleyicisi, tuş takımı, LCD
ekran ve IGBT sürücüsü bulunurken güç devresinde iki adet
alçaltan dönüştürücü yapısı kullanılmıştır. Şebeke gerilimi tam
köprü doğrultucular yardımıyla doğrultulduktan sonra
dönüştürücü girişlerine uygulanmaktadır. Gerçekleştirilen iki
seviye alçaltan dönüştürücü devresi 0-300 volt gerilim ayar
aralığına ve 0-20 amper akım sınır aralığına sahiptir. Kullanıcı
gerilim referans değerleri ile akım sınır değerlerini tuş takımı
yardımıyla mikrodenetleyiciye girmekte ve bu değerleri LCD
ekrandan izleyebilmektedir. Bu çalışmada çıkış gerilim
değerlerinin, referans gerilim değerlerini takip etmesi için PI
denetim tekniğinden yararlanılmıştır. PI denetimin görevi,
çıkış gerilim değerleri ile tuş takımından girilen referans
gerilim değerleri arasındaki hatayı en aza indirmektir. Bu
sayede dönüştürücü çıkış gerilim değerlerinin yük
değişimlerinden
etkilenmemesi
sağlanmıştır.
Ayrıca
dönüştürücü giriş akımları mikrodenetleyici tarafından sürekli
izlendiği için dönüştürücülerin akım sınır değerlerinin altında
çalışması
sağlanmaktadır.
Böylece
hem
alçaltan
dönüştürücülerin hem de bu dönüştürücülerin beslediği
sistemlerin güvenliği sağlanmıştır.
198
Ş. Demirbaş, S. Bayhan, İ. Garip
II. ALÇALTAN DÖNÜŞTÜRÜCÜ DEVRESİ
Şekil 1’de devre şeması verilen alçaltan dönüştürücünün
çıkış gerilim değeri anahtarlama oranına bağlı olarak giriş
geriliminden daha düşük olmaktadır. Devre anahtarın iletim ve
kesim durumuna bağlı olarak iki çalışma durumunda
incelenebilir [11].
is,Is
eL
L
iL,IL
Dm
vC
iC,IC
io,Ia
C
Yük vo,Va
Burada akımda yaşanan dalgalanma,
Va (Vs Va )
fLVs
(5)
I
Vs k (1 k )
fL
(6)
olarak bulunur. Gerilimde yaşanan dalgalanma ise aşağıda
verilen eşitlikler yardımıyla hesaplanabilir [12].
Vc
Va (Vs Va )
8LCf 2Vs
iL
iC
vC
C
a) Anahtar iletim durumunda
io,Ia
Yük
iC
Dm
vC
C
io,Ia
Vc
Yük
b) Anahtar kesim durumunda
Şekil 2. Alçaltan dönüştürücü eşdeğer devreleri
Anahtar kesime götürüldüğü andaki eşdeğer devre Şekil
2.b’de verilmiştir. Burada serbest dönüşüm diyodu yardımıyla
bobin üzerinde depolanan enerji kondansatör ve yük üzerinden
devresini tamamlamaktadır. Anahtarın bir sonraki iletim
durumuna kadar geçen sürede bobin akımında düşüş meydana
gelmektedir. Şekil 3’te her iki çalışma durumunda devre
gerilim ve akım değerlerine ait dalga şekilleri görülmektedir.
Burada t1 anahtarın iletim süresini, t2 anahtarın kesim süresini,
T anahtarlama periyodunu, ∆I bobin akım dalgalanmasını,
∆Vc kondansatör gerilim dalgalanmasını belirtmektedir.
Akımın yükselmesi ve düşmesi doğrusal olarak kabul
edilmiştir. Normalde yarıiletken anahtarlar doğrusal olmayan
bir direnç değerine sahiptir. Fakat bu değer çok küçük
olduğundan ihmal edilmiştir.
Alçaltan dönüştürücü devresinde kullanılan elemanlar;
anahtarlama frekansına, giriş ve çıkış gerilim değerlerinin
büyüklüğüne, akım ve gerilimde yaşanmasına izin verilen
dalgalanmanın büyüklüğüne bağlı olarak aşağıda verilen
eşitlikler yardımı ile hesaplanmaktadır.
Anahtar iletim ve kesim süreleri,
(1)
t1 kT
Vs k (1 k )
Elde edilen bu eşitlikler yardımı ile tasarlanan alçaltıcı
dönüştürücü eleman değerleri hesap yöntemi ile bulunmuştur.
Hesaplama gerçekleştirilirken dönüştürücü çıkış geriliminde
yaşanabilecek dalgalanma göz önünde bulundurulmuştur.
Buna göre devrede kullanılan bobin değerleri 1 mH ve
kondansatör değerleri 2200 µF olarak seçilmiştir. Anahtarlama
frekansı ise 4,8 kHz olarak seçilmiştir.
vD
Vs
t1
0
iL
I2
IL
I1
0
I1
0
ic
I2-Ia
0
I1-Ia
T
t
kT
T
kT
T
t
T
kT
t
t
Vc
0
∆Vc
io
kT
T
t
Ia
0
199
kT
I2
olduğu bilinmektedir. Buna göre alçaltıcı dönüştürücünün çıkış
gerilim değeri;
(3)
t2
∆I
is
Va
t1
kVs
T
(8)
8LCf 2
(2)
Va Vs .
(7)
veya
L
t2 (1 k )T
(4)
veya
Anahtar iletime sokulduğu anda akım yükselmeye
başlayarak bobin, kondansatör ve yük üzerinden devresini
tamamlamaktadır. Alçaltan dönüştürücünün anahtar iletim
durumu için eşdeğer devresi Şekil 2.a’ da verilmiştir.
Vs
I .L.Vs
1
I .L
I .L
t1 t2
f
Vs Va
Va
Va (Vs Va )
I
Şekil 1. Alçaltan dönüştürücü devresi
is=IL
T
iL
Q1
Vs
olarak hesaplanır. Anahtarlama periyodu ise aşağıdaki eşitlik
yardımı ile bulunabilir;
t
Mikrodenetleyici Tabanlı İki Seviye DA/DA Alçaltan Dönüştürücü
Şekil 3. Çalışma durumlarına göre akım-gerilim dalga
şekilleri
III. GERÇEKLEŞTİRİLEN SİSTEM
Gerçekleştirilen iki seviye alçaltıcı dönüştürücüye ait
sistemin devre şeması Şekil 4’te verilmiştir. Sistem güç devresi
ile sürücü ve kontrol devresinden oluşmaktadır. Güç devresi
birbirinden bağımsız çalışan iki adet alçaltan dönüştürücü
devre yapısından oluşmaktadır. Güç devresinde, doğrultucular
yardımıyla elde edilen DA gerilim değerleri dönüştürücülerin
girişlerine uygulanmaktadır. Doğrultucu çıkışlarında yaşanan
dalgalanmaları azaltmak için C1 ve C3 kapasitörleri
kullanılmıştır. Her iki dönüştürücünün giriş akım değerleri
LEM LA-100P akım algılayıcıları yardımı ile okunurken çıkış
gerilim değerleri gerilim bölücü devreleri üzerinden
geçirilerek mikrodenetleyiciye uygulanmaktadır. Uygulamada
FUJI marka 2MBI100U4A-120 modeli iki IGBT
kullanılmıştır. Bu IGBT ler 1200 V, 100 A özelliklere sahiptir.
Mikrodenetleyici tarafından üretilen PWM sinyallerinin IGBT
için uygun düzeye dönüştürülmesi, tasarlanan bir sürme
devresi yardımıyla yapılmaktadır. IGBT sürme devresinde Fuji
marka EXB840 sürücü entegresi kullanılmıştır. Her iki
BR1
dönüştürücü kontrolünün sağlanabilmesi için bir kontrol
devresi tasarlanmıştır.
Program başlangıcında mikrodenetleyicinin kullanılacak
pinleri, analog okuma çözünürlüğü, PWM frekansı, vs.
tanımlamaları yapılmıştır. Programda analog okuma
çözünürlüğü 10 bit ve PWM frekansı 4,8 kHz olacak şekilde
ayarlanmıştır. Daha sonra alçaltan dönüştürücü seçme ekranı
kullanıcıya gösterilmektedir. Kullanıcı burada hangi
dönüştürücü veya dönüştürücülerin kullanılacağını tuş takımı
yardımı ile seçmektedir. Kullanıcı bu ekrandan her iki
dönüştürücüyü seçebileceği gibi sadece DÖNÜŞTÜRÜCÜ 1
veya DÖNÜŞTÜRÜCÜ 2 yi seçebilmektedir. Kullanıcının
seçimine bağlı olarak sonraki aşamada dönüştürücü veya
dönüştürücülere ait çıkış gerilim değerleri ile akım sınır
değerleri mikrodenetleyiciye girilmektedir. Bu değerlerin
mikrodenetleyiciye girilmesi için kullanıcı yine tuş takımından
yararlanmaktadır. Kullanıcı tuş takımı yardımıyla sisteme
TAMAM komutunu verdikten sonra ayar edilen çıkış gerilim
değerleri için PWM sinyalleri mikrodenetleyici tarafından
üretilmeye başlanır. Bu andan itibaren alçaltan dönüştürücü
akım ve gerilim değerleri mikrodenetleyicinin analog
kanallarından okunmaktadır.
L1
a
+
C1
220 Volt
~
C2
Q1
c
D1
Vout1
-
KONTROL VE
SÜRÜCÜ KARTI
Q2
BR2
L2
b
+
C3
C4
D2
d
Vout2
-
Şekil 4. Gerçekleştirilen sistemin devre şeması
Tasarlanan kontrol devresi PIC 18F452 mikrodenetleyicisi,
tuş takımı ve LCD ekrandan oluşmaktadır. Tasarlanan
sistemde
mikrodenetleyici
kullanılmasıyla
çevresel
arabirimler, bir tümleşik aygıt içinde birleştirildiğinden sistem
hızı ve güvenilirliği artmış, maliyet azalmıştır. Aynı zamanda
kullanım kolaylığı sağlanmış ve karmaşık yapı ortadan
kaldırılmıştır. Kullanıcı tuş takımı yardımıyla dönüştürücü
parametrelerini mikrodenetleyiciye girebilmekte ve tüm
işlemleri LCD ekranda izleyebilmektedir.
Dönüştürücü çıkışlarına bağlanacak yük değerlerinin
değişmesi ile çıkış gerilim değerinin sabit kalmasını sağlamak
amacıyla PI denetim tekniğinden yararlanılmıştır. PI denetimin
görevi, çıkış gerilim değeri ile tuş takımından girilen referans
gerilim değeri arasındaki hatayı en aza indirmektir.
Kontrol devresinde yer alan mikrodenetleyici yazılımının
hazırlanmasında CCS C dili kullanılmıştır [13]. Hazırlanan
yazılımın akış diyagramı Şekil 5’de verilmiştir.
Okunan akım değerleri girilen sınır akım değerlerini aşmış
ise PWM sinyalleri sınır akım değerlerini koruyacak şekilde
yeniden üretilmektedir. Eğer akım sınır değerinde aşma
olmamış ise girilen gerilim referans değeri ile ölçülen gerçek
gerilim değeri karşılaştırılmaktadır. Karşılaştırma sonucunda
hata var ise hata sinyali PI denetleyiciye gönderilerek uygun
PWM sinyalleri üretilmektedir. Böylece çıkış gerilim
değerinin, referans gerilim değerini izlemesi sağlanmaktadır.
Sistem durdurulmadığı sürece tüm bu işlemler sürekli
tekrarlanmaktadır. Çalışma esnasında tüm akım ve gerilim
değerleri anlık olarak LCD ekranda gösterilerek kullanıcı
bilgilendirilmektedir. Her iki dönüştürücü çalışır durumda iken
istenilen dönüştürücünün çalışması sonlandırılabilmektedir.
Dönüştürücüler birbirinden bağımsız çalıştığı için bir
dönüştürücünün
çalışması
diğer
dönüştürücüyü
etkilememektedir.
200
Mikrodenetleyici Tabanlı İki Seviye DA/DA Alçaltan Dönüştürücü
Başla
PIC 18F452 başlangıç
ayarlarının yapılması
Dönüştürücü seçme
ekranı
Referans gerilim değeri
ve akım sınırının
girilmesi
Değerler girildi mi?
H
Şekil 6. Deneysel çalışmalar için kullanılan deney düzeneği
E
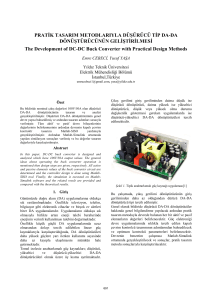
Gerçekleştirilen deneysel çalışmaların ilkinde dönüştürücü
çıkış gerilimlerinin referans gerilime oturma zamanları
ölçülmüştür. DA motorunun endüvi sargılarını besleyen
dönüştürücü çıkış gerilimi 200 volta ayarlanırken, uyartım
devresini besleyen dönüştürücü çıkışı 50 volta ayarlanmıştır.
Dönüştürücülerin çalışmaya başladığı andaki gerilim sinyalleri
Şekil 7’de verilmiştir. Her iki dönüştürücü çıkış gerilim
değerlerinin referans gerilim değerine oturma zamanları
incelendiğinde; birinci dönüştürücünün 200 volt referans
gerilim değerine 820 ms’de, ikinci dönüştürücünün 50 volt
referans değerine 350 ms’de oturduğu ve kararlı hale geldiği
görülmüştür.
PWM sinyallerinin
üretilmesi
Analog kanallardan
akım ve gerilim
bilgilerinin
okunması
Akım değeri sınır
değeri aştı mı?
E
H
PI Denetleyici
H
Çıkış gerilim
değerleri ref değerle
aynı mı?
E
Sistem durduruldu
mu?
H
E
Dur
Şekil 5. Mikrodenetleyici yazılımının akış diyagramı
IV. DENEYSEL ÇALIŞMALAR
Deneysel çalışmalar için Şekil 6’ da görülen deney düzeneği
kullanılmıştır. Bu deney düzeneği bir DA motoru ve bu
motorun miline akuple bağlı bir yük düzeneğinden
oluşmaktadır. Gerçekleştirilen iki seviye alçaltan dönüştürücü,
DA motorunun uyartım ve endüvi sargılarını besleyecek
şekilde bağlantılar yapılmıştır.
Şekil 7. Dönüştürücü çıkış gerilim sinyallerinin referans
gerilim değerine oturması
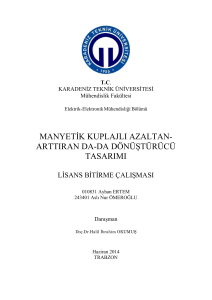
Gerçekleştirilen diğer deneysel çalışmada ise DA
motorunun miline bağlı yük birimi kullanılarak DA motoru
yüklenmiştir. Bu anda dönüştürücü çıkış gerilim değişimi
201
Ş.Demirbaş, S. Bayhan, İ. Garip
izlenerek PI kontrolörün tepkisi gözlemlenmiştir. Şekil 8’de
görüldüğü gibi yüklenmenin yaşandığı anda dönüştürücü çıkış
gerilimi yaklaşık 170 volta düşmekte ancak PI kontrolör
yardımıyla 640 ms içinde tekrar 200 volta yerleşmektedir.
Şekil 8. DA motorun yüklenmesi anında dönüştürücü çıkış
gerilim eğrisi
birbirinden bağımsız çalışan, iki seviye alçaltan dönüştürücü
mikrodenetleyici
tabanlı
olarak
gerçekleştirilmiştir.
Mikrodenetleyici
olarak
PIC18F452
kullanılmıştır.
Gerçekleştirilen iki seviye alçaltan dönüştürücü devresi 0-300
volt gerilim ayar aralığına ve 0-20 amper akım sınır aralığına
sahiptir. Kullanıcı gerilim referans değerleri ile akım sınır
değerlerini tuş takımı yardımıyla mikrodenetleyiciye girmekte
ve bu değerleri LCD ekrandan izleyebilmektedir. Bu
çalışmada çıkış gerilim değerlerinin, referans gerilim
değerlerini takip etmesi için PI denetim tekniğinden
yararlanılmıştır. PI denetimin görevi, çıkış gerilim değerleri ile
tuş takımından girilen referans gerilim değerleri arasındaki
hatayı en aza indirmektir. Bu sayede dönüştürücü çıkış gerilim
değerlerinin yük değişimlerinden etkilenmemesi sağlanmıştır.
Ayrıca dönüştürücü giriş akımları mikrodenetleyici tarafından
sürekli izlendiği için dönüştürücülerin akım sınır değerlerinin
altında çalışması sağlanmaktadır. Böylece hem alçaltan
dönüştürücülerin hem de bu dönüştürücülerin beslediği
sistemlerin güvenliği sağlanmıştır. Deneysel sonuçlar,
gerçekleştirilen iki seviye alçaltan dönüştürücünün ani yük
değişimlerine hızlı tepki verdiğini, kararlı çalıştığını ve düşük
maliyetli bir sistem olduğunu göstermiştir.
KAYNAKLAR
Son olarak dönüştürücü çıkış gerilim seviyesinin farklı
referans gerilim değerlerini izlemesi gözlemlenmiştir. Bunun
için farklı referans gerilim değerleri tuş takımı yardımı ile
sisteme girilmiştir. İlk önce dönüştürücü çıkış gerilimi 50 volta
daha sonra 150 volta son olarak ta 100 volta ayarlanmıştır.
Şekil 9’da görüldüğü gibi dönüştürücü çıkış gerilimi girilen
referans gerilim değerini tuş takımından girilen her değer için
hızlı bir şekilde takip edebilmiştir.
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
Şekil 9. Dönüştürücü çıkış geriliminin referans değeri izlemesi
[11]
V. SONUÇLAR
[12]
Bu çalışmada farklı DA gerilim seviyelerine ihtiyaç duyan
yüklerde (yabancı uyartımlı DA motor, vb.) kullanılmak üzere
[13]
202
Smedley K.M., Slobodan C., “One-Cycle Control of Switching
Converters”, IEEE Transactions on Power Electronics, Vol 10, No 6,
625-634, (1995).
Sefa İ., Altın N., Özdemir Ş., “dSPACE Based Fuzzy Logic Controlled
Boost Converter”, 4th International Conference on Technical and
Physical Problems of Power Engineering TPE-2008, University of
Pitesti, Pitesti, Romania, (2008).
Guo L., Nelms H., Nelms R.M., “Design and Implementation of Sliding
Mode Fuzzy Controllers for a Buck Converter”, IEEE International
Symposium on Industrial Electronics, 1081-1087, Montreal, Canada,
(2006).
Demirtaş M., Sefa İ., Irmak E., Çolak İ., “Güneş Enerjili Sistemler İçin
Mikrodenetleyici Tabanlı DA/DA Yükselten Dönüştürücü”, Gazi
Üniversitesi Mühendislik Mimarlık Fakültesi Dergisi, Cilt 23, Sayı 22,
719-728, (2008).
Koutroulis E., Kalaitzakis K., Voulgaris N.C., “Development of a
Microcontroller-Based Photovoltaic Maximum Power Point Tracking
Control System”, IEEE Transactions on Power Electronics, Vol. 16, No.
1, 46-54, (2001).
Yousefzadeh V., Wang N., Popovic Z., Maksimovic D., “A Digitally
Controlled DC/DC Converter for an RF Power Amplifier”, IEEE
Transactions on Power Electronics, Vol 21, No 1., 164-173, (2006).
Çolak İ., Soysal M., Irmak E., Bayındır R., “DA Motorunun Dört Bölge
Denetiminin Eğitim Amaçlı Gerçekleştirilmesi”, Politeknik Dergisi, Cilt
10, Sayı 3, 219-227, (2007).
Ilic M., Hesterman B., Maksimovic D., “Interleaved Zero Current
Transition Three-Level Buck Converter”, 21st Annual IEEE Applied
Power Electronics Conference and Exposition, 77-78, (2006).
Yousefzadeh V., Alarcon E., Maksimovic D., “Three-Level Buck
Converter for Envelope Tracking Applications”, IEEE Transactions on
Power Electronics, Vol 21, No 2, 549-552, (2006).
Ilic M., Maksimovic D., “Averaged switch modeling of the interleaved
zero current transition buck converter”, IEEE 36th Power Electronics
Specialists Conference, 2158-2163, (2005).
Rashid M., “Power Electronics, Circuits, Devices and Applications”,
Prentice Hall, Third Edition, USA, (2004).
Mohan N., Undeland T. M., Robbins W. P., “Power Electronics:
Converters, Applications and Design”, 2nd Edition, John Wiley & Sons
Inc., England, (1995).
Çiçek, S., “CCS C ile PIC Programlama”, Altaş Yayıncılık, İstanbul,
(2007).