MKT5001 Seminer Programı
Bahar 2016
7/6/2016, Salı
9:00 – 12:30
Fen Bilimleri Enstitüsü F17 nu
A Blok 310 numaralı salon
1 FİBER YERLEŞTİRME ROBOTU
9:00-9:30
Serdar Ezber
Termoplastik, termoset veya kuru fiber olarak adlandırılan malzemelerin infrared veya lazer
kürleme yöntemi ile robotlar aracılığıyla istenilen yüzeye yerleştirilmesi işlemi fiber yerleştirme
olarak tanımlanabilir. Bu işlemi gerçekleştirmek için kafa diye adlandırdığımız içerisinde fiber
bobinlerinin, ısıtıcıların, algılayıcıların ve aktüatörlerin olduğu bir yapı ve bu yapının konumunu
kontrol etmesi için6 eksenli bir robot manipülatörü gerekli olacaktır. Bu uygulamada manipülatör
uç işlevcisi kısmında robotun temasta olduğu bölgeye göre baskı uygulaması veya yumuşak
dokunması gerekir. Bu nedenle manipülatör uç işlevcisinin yüzey ile girdiği etkileşim kontrolü ise
empedans yöntemiyle gerçekleştirilmesi öngörülmektedir. Empedans kontrol tasarımı sistemin
dinamik modeli kullanılarak yapılabilir. Sistem ve eyleyiciler dikkate alındığında empedans
kontrol yöntemi konum ve kuvvet tabanlı olmak üzere tasarlanabilir. Buna istinaden bu çalışmada
robotun kontrolü için iki görev tanımlanabilir bunlar: i) Serbest uzayda konum kontrolü ii)
Etkileşim halinde empedans kontrolü şeklindedir.
2 MİKRO-ROBOT KOLU DİZAYNI, SİMÜLASYONU, ÜRETİMİ VE
TEMASSIZ MANİPÜLASYON TEKNİĞİNİN GELİŞTİRİLMESİ
9:30-10:00
Ayşe İlginoğlu
"Lab-on-a-chip" (mikroakışkan-çipler), mikro/nano-robotik alanın yoğun olarak kullanıldığı ve
çeşitli fonksiyonlara sahip sistemlerin (mikroskop, kamera, otomatik hareket eyleyiciler) entegresi
ile biyomedikalde insan hastalıklarının üzerinde çalışılmasına olanak sağlayan bir platformdur.
Son on yılda, mikroakışkan-çip platformu kullanılarak hastalıkları ve hastalıkların ilerleme
safhalarını anlamamızı ve tedavi yöntemlerini bulmamızı sağlayan yeni biyomedikal ürünler
geliştirmek mümkün olmaktadır. Bu alanda yüksek hız ve hassasiyette biyolojik hücre ve obje
manipülasyonuna ihtiyaç duyulmaktadır. Ayrıca operasyonel manada mikrobiyoloji, embriyoloji,
elektrofizyoloji, genetik bilimi ve klinik uygulamalarında yaygınca kullanıldığı da görülmektedir.
Üretilen mikro-robot kolu manyetik alan etkisi altında çalışabilecek, temassız olarak hareket
ettirilebilecek ve bu sayede labon- a-chip (mikroakışkan kanallara ve odalara sahip mikro-çipler)
içine yerleştirilebilmesine olanak sağlayacak şekilde dizayn edilmiştir. Mikro-robot kolu kaldırma
kuvveti ile sıvı içinde sağlayacağı levitasyon sayesinde havada tutularak sürtünmenin azaltılması
ve bu sayede yüksek hassasiyette hareket elde edilmesi hedeflenmektedir. Öncelikle COMSOL
Multi fizik analiz programında mikro-robotun maruz kaldığı manyetik ve akışkan kuvvetlerin
modellenmesi yapılarak robotun dikeyde ve yatayda hareketleri incelenecektir. Sonuçlar deney
düzeneğinin oluşturulmasına referans olarak kullanılacaktır. Ardından mikro-robota etki eden
kuvvetler hesaplanarak hareket denklemi elde edilecektir. Daha sonra deney düzeneği kurularak
hassas konum kontrolü çalışmalarına başlanacak ve gelecekte kontrolün iyileştirilmesi için ne gibi
çalışmalar yapılabileceği ifade edilecektir.
3 SU ALTI ARACININ MODELLENMESİ VE KONTROLÜ
10:00-10:30
Alper Yalman
İnsansız otonom sualtı araçları günümüzde denizcilik araştırmaları içerisinde güncel ve zorlu
araştırma alanlarından biridir. Sualtı keşif ve gözetleme, arama ve kurtarma, liman ve kıyı
güvenliği, bilimsel araştırmalar, savunma sanayi uygulamaları gibi birçok farklı alanda
kullanımları bulunmaktadır. İnsansız olarak kullanılan otonom sualtı araçlarında, uygulamada
görev başarı oranının yükseltilmesi ve maliyetin düşürülmesi önemli faktörler olarak öne
çıkmaktadır. Bu doğrultuda ilk olarak otonom sualtı aracının matematiksel modelinin
oluşturulması ve buna uygun kontrol sistemlerinin tasarlanması gerekmektedir. Matematiksel
model kinematik ve dinamik hesaplama yöntemleri kullanılarak elde edilmektedir. Literatürde
kullanılan yaygın modeller bulunmaktadır. Özellikle Thor I. Fossen’in kaynakları yapılan çoğu
çalışmada referans olarak gösterilmektedir. Modelde akışkanla etkileşimden dolayı oluşan
kuvvetler ve momentleri bulmak için kullanılan parametrelerin hesaplanması zordur ve genellikle
analiz ya da deneysel yöntemlerle yaklaşık olarak bulunmaktadırlar. Bu parametreler aracın
yapısına ve aracın hareketi sırasında hız, ivme gibi dinamiklere bağlı olarak da değişkenlik
göstermektedir. Bu durumda sistemde kullanılacak olan kontrolcü yapısının önemi ortaya
çıkmaktadır. Yapılan çalışmalarda genel olarak araçların farklı eksenlerdeki hareketlerinin
birbirinden bağımsız olduğu düşünülerek denklemler ayrıştırılmakta ve her bir denklem grubu için
kontrolcü tasarımları yapılmaktadır. Burada çalışma koşullarına bağlı olarak çeşitli noktalarda
sistemin doğrusallaştırılması da tasarımı kolaylaştırabilmektedir. Ancak çoğu sistem modeli
doğrusal değildir ve hidrodinamik parametrelerin tümü ölçülememekte ve/veya
hesaplanamamaktadır. Bu sebeple Sliding-Mode, Neural Network, Adaptive Control gibi sistemde
tam olarak bilinmeyen parametrelerin etkilerini yansıtabilecek kontrolcü yapılarının kullanılması
önem arz etmektedir. Bu çalışmada özellikle torpido şekilli otonom sualtı araçları için literatürde
kullanılan model ve kontrolcü yapıları hakkında bilgi verilecek ve tez çalışması kapsamında
yapılması planlanan çalışmalar hakkında bilgi paylaşımında bulunulacaktır.
4 MİKRO UÇAN HAVA ARAÇLARININ UÇUŞ DİNAMİĞİ VE KANAT
YAPILARI
10:30-11:00
Anıl Demirçalı
İnsansız Hava Araçları (IHA) hem sivil hem de askeri uygulamalarda her geçen gün daha çok
kullanılan robotlardır. Bu robotlar hali hazırda gözetleme, keşif, haritalandırma gibi sivil
uygulamalarda, hedef tespiti, imha gibi askeri uygulamalarda kullanılabilmektedir. Teknolojik
gelişmeler sayesinde daha kompleks yapılı ve akıllı sensörler; uçuş yetenekleri ve taşıma
kapasiteleri geliştirilmiş yeni tasarımlar ortaya çıkmaktadır. Bu motivasyon içerisinde çalışma
amacı tasarım, imalat ve uçuş kontrolüne odaklanmaktır. Kanat çırpan ( flapping wing ) iha modeli
temel alınarak; farklı mekanik tasarımlar üzerinde kanat ve polimer yapısının itki(trust) üzerindeki
etkisi, uçuş optimizasyonu araştırılacak olup ۶ஶ çıkış geri beslemeli dinamik output feedback
kontrolör yapısı, tasarımın performansı gerçek uçuş testleriyle doğrulanacaktır.
5
MİKRO İMALATTA LIGA YÖNTEMİ, UYGULAMA PRENSİPLERİ VE
KULLANIM ALANLARI
11:00-11:30
Tunç Köse
Üretilmek istenen parça konstrüksiyonları küçüldükçe, standart imalat teknikleri yetersiz kalmakta,
daha özel imalat tekniklerine başvurma ihtiyacı doğmaktadır. Bu ihtiyaç mekaniksel unsurlarmekanizmalar için olabileceği gibi, elektronik-elektromekanik kompanentlerin fabrikasyon
aşamaları için de ortaya çıkmaktadır. Bu konstrüktif yapılar makro boyuttan mikro boyutlara
indirgenmiş ölçütlerde olmaları durumunda; 1950’lerin ortalarında literatüre giriş yapmış olan
MEMS(Mikro Elektro-Mekanik Sistemler) imalat metodu, literatürde en sık rastlanan ve
kullanılan fabrikasyon tekniği olarak öne çıkmaktadır. Bu çalışmada; mikro parça üretimi için
MEMS tekniği, ana unsurları ve içinde barındırdığı uygulama metodları ile tanımlanacak; bu
metodların en önemlilerinden biri olan LIGA (Lithographie, Galvanoformung, Abformung Lithography, Electroplating, and Molding) metodu irdelenecektir. LIGA metodunun diğer
metodlara göre avantaj ve dezavantajları, metodun kullanım alanları da göz önünde
bulundurularak değerlendirilecektir.
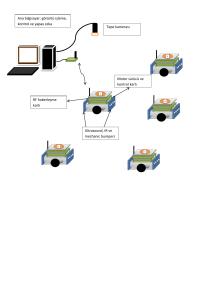
6 ELLERİNİ KULLANAMAYAN KİŞİLER İÇİN GELİŞTİRİLMİŞ
ROBOTİK DİŞ FIRÇALAMA ÜNİTESİ
11:30-12:00
H. Cansu Paksoy
Projenin amacı diş fırçalama işleminin ellerini kullanamayan kişiler veya fırçalama işlemi için
başkasına gereksinim duyan kişiler tarafından rahatlıkla ve kimseye ihtiyaç duyulmadan
yapılmasına imkan veren bir cihaz ortaya koymaktır. Dizayn parametreleri; sistemin kullanıcı
çenesini değdirdiği zaman harekete geçmesi, macunun ve diş fırçalamada kullanılacak olan suyun
sensörler ile kullanıcıya sunulması, sistemin kullanıcının dişlerini 30 saniye içerisinde temizlemesi
olarak özetlenebilir. Bu özelliklerin sağlanması amacı ile, sistem 4 eksenli paralel mekanizmalı
minyatür bir robot koluna entegre edilmiş özgün tasarımlı çoklu diş fırçasından oluşmaktadır.
Robot kolu kullanıcılar ile doğrudan temas haline olacağı için gelişmiş kontrol algoritmasının
kurulması gerekmektedir.
7 2 SERBESTLİK DERECELİ PARALEL ROBOTUN ANALİZİ
12:00-12:30
Yunus Emre Tomruk
Paralel robotlar sınırlı çalışma uzayına sahip olmalarına rağmen seri robotlardan daha katı, hızlı
ve doğru sonuçlar verirler. Genel olarak endüstride çok serbestlik dereceli(6-DOF) simülatör
uygulamalarında kullanılmalarına rağmen günümüzde daha düşük serbestlik dereceli (2-DOF,3DOF) dizme, tut ve yerleştir ve parça işleme uygulamalarında da kullanılmaya başlanmıştır. Bu
çalışmada ise var olan paralel manipülatörlerden daha farklı bir yapıya sahip 2-DOF bir paralel
mekanizma üzerinde çalışılmıştır. Bu çalışmada mekanizmanın kinematik, çalışma uzayı, tekillik
analizleri yapılmıştır. Robotun yapısal parametrelerini belirleyebilmek için kinematik
parametreler ile çalışma uzayı arasında bir bağlantı kurulmuştur. Son olarak mekanizmanın katılık,
manipüle edilebilirlik ve geçirgenlik gibi performans indisleri değerlendirilmiştir.