İSTANBUL ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
ELEKTRİK-ELEKTRONİK MÜH. BÖLÜMÜ
ELEKTRİK MAKİNALARI
LABORATUVARI
DENEY 1
BİR FAZLI TRANSFORMATÖR
DENEYLERİ
DENEY 1
BİR FAZLI TRANSFORMATÖR DENEYLERİ
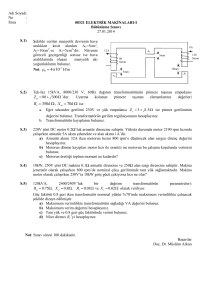
I– GİRİŞ
Açık devre testinde transformatörün bir sargısı anma gerilimi ve frekansında
beslenirken diğer sargısı açık devre edilir. Yüksüz durumdaki akım ve giriş gücü ölçülür.
Yüksüz durumdaki akım, tam yük akımının küçük bir oranı olduğundan transformatörün
beslenen tarafındaki bakır kayıpları ihmal edilebilecek kadar düşüktür. Bu durumda giriş
gücü, bakır kayıpları akımın karesiyle doğru orantılı olduğundan, transformatörün anma
gerilimindeki demir kayıplarını temsil eder. Açık devre testinde transformatörün her iki tarafı
da beslenebilmekle birlikte, dağıtım sistemlerinde kullanılan büyük güçlü transformatörler söz
konusu olduğunda, ölçme aletlerinin bağlantıları ve çalışma aralıkları için uygulandığından
dolayı düşük gerilim tarafının beslenmesi tercih edilir.
Kısa devre testinde, sargılardan biri kısa devre edilirken diğer sargı anma geriliminin
genellikle %5’i veya %10’u oranındaki bir gerilimle beslenir. Bu durumda devreden tam yük
akımı akar. Demir kayıpları uygulanan gerilimin karesiyle doğru orantılı olduğundan bu testte
küçüktür ve bu durumda giriş gücü o yükteki bakır kayıplarını gösterir. Ölçme aletlerinin
bağlantıları ve çalışma aralıkları için uygulandığından kısa devre testinde genellikle yüksek
gerilim tarafının beslenmesi tercih edilir.
Bu testlerin avantajı, sonuçlarının; büyük transformatörde tam yük altında yapılan
testlerin maliyetlerine ve zorluklarına katlanmak zorunda kalmadan transformatörün
verimliliğini, yaklaşık eşdeğer devresinin ve regülasyonunun hesaplanmasını mümkün
kılmasıdır.
II - DENEYİN YAPILIŞI
Deneyde Kullanılacak Aletler ve Yapılacak İşlemler
NE9044 Transformatör Eğitim Seti
Analog Vatmetre
Digital Multimetre
İlgili Bağlantı Elemanları
Test 1 : Düşük gerilim tarafından beslenen açık devre testi:
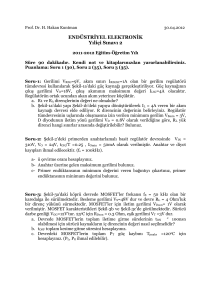
Şekil 1.1’de gösterildiği gibi deney düzeneğini kurunuz ve gerekli bağlantıları yapınız.
Şekil 1.1 : Açık devre testi bağlantı şeması
Oto transformatör ile gerilimi %10’luk oranlarla anma gerilimi olan 120V’a kadar
arttırınız, her bir gerilim değerine karşı düşen akım ve güç değerlerini Tablo 1.1’de not ediniz.
Anma geriliminin %10’u üzerinde de bir ölçüm alınız.
Tablo 1.1
Giriş Gerilimi Hat Akımı, I0 Mıknatıslanm Demir Akımı, Güç, P
Güç Faktörü,
(V)
ϕ0
10
20
30
40
50
60
70
80
90
100
110
120
130
(mA)
a Akımı, Im
Ip
(A)
(mA)
(mA)
(W)
Test 2 : Yüksek gerilim tarafından beslenen kısa devre testi.
Şekil 1.2’de gösterildiği gibi deney düzeneğini kurunuz ve gerekli bağlantıları yapınız.
Oto–transformatör ile akımı %10’luk oranlarla anma akımı olan 4.2 A’e kadar
arttırınız, her akım değerine karşı düşen gerilim ve güç değerlerini Tablo 1.2’de not ediniz.
Anma akımının %10’u üzerinde de bir ölçüm alınız.
Şekil 1.2 Kısa devre testi bağlantı şeması
Tablo 1.2
Akım, (A)
0.41 0.82 1.21
1.6
2.04
2.42
2.82
3.22
3.62
4.01
4.43
4.6
Gerilim,(V)
Güç, (W)
III- SONUCLARIN İNCELENMESİ
Açık devre testinde her bir ölçüm için güç faktörünü, p, (p = P/(VI0)), hesaplayınız.
Akım bileşenlerini elde ediniz. Akımın güç bileşeni Ip = I0Cosϕ0 ve mıknatıslanma akımı
Im = I0Sinϕ0 ‘ dir. V-P, V-I0, V-Ip, ve V-Im grafiklerini çiziniz, sonuçları yorumlayınız. Bu
grafiklerden transformatörün eşdeğer şönt direnci R0 ve eşdeğer şönt reaktansı X0’yı elde
ediniz.
Kısa devre testi için I-V ve I2-P grafiklerini çiziniz, sonuçları yorumlayınız. Bu
grafiklerden transformatörün eşdeğer empedansını, eşdeğer direncini ve eşdeğer reaktansını
elde ediniz.
Açık devre ve kısa devre testlerinden elde ettiğiniz değerlerle transformatörün yaklaşık
eşdeğer devresini alçak gerilim tarafından görüldüğü gibi çiziniz. Yüksek gerilim tarafından
elde edilen değerler çevirme oranının karesine bölünerek alçak gerilim tarafına geçirilebilir.
Şekil 1.3 Transformatörün yaklaşık eşdeğer devresi
Yaklaşık eşdeğer devresine göre transformatörün regülasyonu aşağıdaki gibi tanımlanabilir:
% regülasyon = 100*(V1’-V2)/V1’
ve yaklaşık olarak aşağıdaki gibi ifade edilebilir:
% regülasyon = 100x((IR/V)Cosφ ± (IX/V)Sinφ) +( 100x2/2)((IX/V) Cosφ ± (IR/V)Sinφ)2
Burada,
I : Tam yükteki anma akımı
V : Sistemin anma gerilimi
x : Transformatörün yüklenme oranı
(IR/V) ve (IX/V) terimleri transformatörün birim direncini ve birim reaktansını temsil
etmektedir.
Güç faktörünü 1, V2 = V1’ =240V alarak Tablo 1.2’de belirtilen yükleme koşulları için
% regülasyonu hesaplayınız ve grafiğini çizerek sonuçları yorumlayınız.
Verim Hesabı :
Bir sistemin verimi sistemden çekilen gücün sisteme gönderilen güce oranına eşittir.
Verim direkt veya endirekt olarak hesaplanabilir. Verimin direkt olarak hesaplandığı
yöntemde sekonder gücün primer güce oranı alınır (η = P2/P1). Endirekt yöntemde ise verim
boşta çalışma ve kısa devre deneylerinden belirlenen demir ve bakır kayıpları yardımıyla
hesaplanır .
η = P2/(P2 + PCU + PFE )
η = (1-kayıp güç/giriş gücü)*100 = (1-(PFE + x2*PCU)/(x*S*Cosϕ0+PFE+ x2*PCU))*100
Burada,
S : VA cinsinden transformatörün gücü, (1 kVA)
Cosϕ0 : Yükün güç faktörü
PFE : Anma gerilimindeki demir kayıpları
PCU : Anma akımındaki bakır kayıpları
x : Transformatörün yüklenme oranı
olmaktadır.
Güç faktörünü 1 alarak ve önceki testlerde hesaplanılan bakır ve demir kayıplarını
kullanarak Tablo 1.2’de belirtilen yükleme koşullarının her biri için verimi hesaplayınız
Aldığınız değerlerle U2 – I2, %U –I2, %η - P2 ve I – P2 grafiklerini çiziniz, sonuçları
yorumlayınız.
Transformatörün hesapladığınız ve çizdiğiniz % regülasyon ve %η grafikleri ile
deneysel olarak elde ettiğiniz verilerle çizdiğiniz % regülasyon ve %η grafiklerini
karşılaştırınız ve yorumlayınız. Direkt ve endirekt olarak hesapladığınız verim değerlerini
karşılaştırınız.
IV- SORULAR
1. Boşta çalışma ve kısa devre deneylerini kısaca anlatınız. Ölçü aletlerinin
bağlanmasında nelere dikkat edilmelidir?
2. Birincil tarafa indirgenmiş fazör diyagramını çiziniz.
3. Herhangi bir yükleme oranında transformatörün verim ifadesini çıkartınız ve verimin
nelere bağlı olduğunu açıklayınız. Verim neden önemlidir.
4. Besleme frekansının değişimi demir ve bakır kayıplarınını nasıl etkileyecektir?
Açıklayınız.
5. Transformatör i) 0.8 endüktif güç faktöründe ii) 0.6 kapasitif güç faktöründe nominal
geriliminde çalıştığında verimi hesaplayın
6. Kısa devre deneyinde hesaplanan ile doğru akımla ölçülen sargı dirençleri arasında
fark var mıdır? Neden?
7. Boşta çalışma primerdeki vatmetrede okunan güç hangi kayıpları kapsar.
8. 220V ve 60Hz için hesap edilmiş bir transformatör 220V ve 50Hz’lik bir şebekeye
bağlanırsa,
transformatörün
mıknatıslanma
akımı,
gerilimleri ve kayıplarında ne gibi değişiklikler olur?
endüksiyonu,
endüklenen
DENEY 2
ASENKRON MOTORA YOL VERME
YÖNTEMLERİ
I – GİRİŞ
Üç Fazlı Alternatif Akım Makinaları :
Asenkron motor bir alternatif akım makinasıdır. İlk defa Nikola Tesla tarafından patenti
alınmıştır. Motorun imalatı ise Westinghouse firması tarafından Nikola Tesla yönetiminde
gerçekleştirilmiştir.
Sanayide kullanılan motorların, aynı güçteki başka bir tür motora göre, en sağlamı, en
ucuzu ve bu yüzden en çok kullanılanıdır. Çok fazlı a.c. makinaları yapıları gereği diğer
tipteki makinalardan daha verimli olmalarının yanında daha düşük güç/ağırlık oranına
sahiptirler. Genellikle, doğru akım makinalarına göre daha kolay imal edilirler, dayanıklı ve
güvenilirdirler. En önemli sınırlamaları, normal şebeke frekansına bağlandıklarında dakikada
ancak 3000 devirle veya daha düşük bir devirle dönmeleridir. Mevcut gerçek hızları, hız
kutup sayısına bağlı olduğundan, dakikada 3000, 1500, 750, 600 gibi devir sayıları sınırlıdır.
Hızdaki bu sınırlama bir ölçüde değişken frekanslı sürücü düzenekleriyle aşılmaktadır.
Üç Fazlı Asenkron Endüksiyon Motor :
Kullanımda bulunan elektrik motorlarının %90’ı sincap kafesli asenkron endüksiyon
motordur.
Sincap kafesli asenkron motorun çalışma ilkesi stator sargıları tarafından üretilen döner
manyetik alana dayanmaktadır. Senkron hızla dönen manyetik alan, iki taraftan da kısa devre
edilmiş rotor çubuklarında zıt bir elektro-motor kuvvet endükler ve akan akımlar ikinci bir
manyetik alan sistemi oluşturur. Stator sargılarının ve rotor çubuklarının meydana getirdiği
manyetik alanların etkileşiminden; rotoru, döner manyetik alanla aynı yönde fakat daha düşük
bir hızla döndüren bir moment doğar. Rotorun hızı motora bağlı olan yük arttıkça düşer.
Bir endüksiyon motorun anma hızı stator sargılarının tasarımı ve besleme kaynağının
frekansı ile belirlenir. Faz başına P çift kutupla sarılmış ve f Hertz’lik bir kaynakla beslenen
bir makinanın anma hızı
ns = (60*f )/P rpm
Denklemiyle ifade edilebilir. ns motorun Senkron Hızıdır. Mekanik kayıplardan dolayı motor
senkron hıza ulaşamaz. Senkron hızla rotorun yük altındaki gerçek hızı arasındaki farka
Kayma Hızı veye yalnızca Kayma denir. Kayma, s, senkron hızın bir oranı olarak da ifade
edilebilir.
s = (ns - nr)/ns
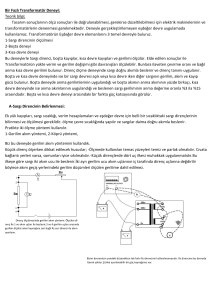
Asenkron Motora Yolverme Yöntemleri:
Bir asenkron motor dururken n=0 ve s=1’dir. Bu halde stator sargılarına tam gerilim
uygulandığında motor bağlı olduğu şebekeden nominal akımının (5-6) katı daha büyük akım
çeker. Büyük güçlü motorlarda ve bunların çekebileceği zayıf şebekelerde bu akım şebekede
gerilimin azalmasına sebep olmaktadır. Motor sayısı arttıkça sistemde aşırı gerilim düşümleri
meydana gelir. Dolayısıyla motorun yol alma akımını sınırlamak gerekir.
Çalıştıralacak iş makinasının özelliklerine göre yolalma koşulları: hafif (Mo=0,10,4)Mnom ; normal (Mo=0,4-0,75)Mnom ; ağır (Mo=0,75-1,0)Mnom olabilir.
Pratikte kullanılan yolverme yöntemlerinden bazıları şöyle sınırlanabilir:
1. Doğrudan yolverme
2. Ototransormatörle yolverme
3. Statora transformatör ve ya direnç bağlayarak yolverme
4. Rotora direnç bağlayarak yolverme
5. Yıldız-üçgen yolverme
Yıldız Üçgen Bağlantı ile Yolverme:
Stator sargıları önce yıldız bağlanır. Bu durumda faz gerilimi ve faz akımı
birine düşer.
3 ’te
Sonra stator sargıları üçgen bağlanır. Motor yıldız bağlıyken hat akımı üçgen bağlantıya göre
üç kat küçüktür:
Yıldız bağlı motor yol alır ve devir sayısı nominal değerine yaklaştığında stator
sargıları üçgen bağlanırsa faz sargılarına nominal gerilim uygulanmış olur. Sargı bağlantı
dönüşümü sırasında oluşabilecek akım atlaması tehlikeli değildir.
Yıldız-üçgen dönüşümüyle yol verme yönteminin önemli bir dezavantajı vardır: Hat
gerilimi
3 ’te birine düştüğünden dolayı, yol alma momenti 1/3 oranında azalır, (My.a
2
≡ U1 ). Bundan dolayı bu yöntem, yük momenti büyük olan kısa devre rotorlu asenkron
motorların yol almasında kullanılamaz.
II- DENEYİN YAPILIŞI
Deneyde Kullanılacak Aletler ve Yapılacak İşlemler
FH2 MKIV Deney Seti
FH90 Sincap Kafesli Endüksiyon Motor
V3 A.C. Voltmetre, 250 V kademesinde
A3 A.C. Ampermetre,2A kademesinde
W1 A.C. Vatmetre,500 W kademesinde
Dijital ampermetre
Test 1 : Sincap kafesli asenkron bir motorun sargıları üçgen bağlantı yapılarak
çalıştırılması
Deney düzeneğini şekil 2.1’den takip ederek sargı uçlarını üçgen bağlantı olacak
şekilde ayarlayınız. Üç fazdan beseleyiniz. Bir sargı üzerindeki akımı görecek şekilde
ampermetre bağlantısını yapınız. Sistemi boşta çalıştırarak kaynaktan çektiği akımı not ediniz.
Şekil 2.1 Deney seti bağlantı uçları
Daha sonra şekil 2.2.’deki devreyi kurunuz. Yük bağlantısını yaptıktan sonra motoru
çalıştırınız. Motor yaklaşık olarak durana kadar momenti arttırınız. Durduğu anda her üç
sargıdaki gerilim, kalkış akımı ve güç değerini ayrıca göstergeden okuduğunuz kalkış
momentini kaydediniz.
Şekil 2.2 Deney düzenği
Test 2 : Sincap kafesli asenkron bir motorun sargıları yıldız bağlantı yapılarak
çalıştırılması
Deney düzeneğini şekil 2.1’den takip ederek sargı uçlarını yıldız bağlantı olacak
şekilde ayarlayınız. Üç fazdan beseleyiniz. Bir sargı üzerindeki akımı görecek şekilde
ampermetre bağlantısını yapınız. Sistemi boşta çalıştırarak kaynaktan çektiği akımı not ediniz.
3 fazlı ampermetreyi sargılara bağlayınız. Yük bağlantısını yaptıktan sonra motoru
çalıştırınız. Motor yaklaşık olarak durana kadar momenti arttırınız. Durduğu anda her üç
sargıdaki kalkış akımı ve göstergeden okuduğunuz kalkış momentini kaydediniz.
III- SONUCLARIN İNCELENMESİ
Her iki testte elde ettiğiniz sonuçları, yıldız üçgen bağlantı dönüşümündeki akım ve gerilim
ifadelerini şekil 2.3’deki eşdeğer sargı bağlantı şekillerine göre çıkartarak karşılaştırınız.
B
UfΔ
IhΔ
Z
Ihλ
B
IfΔ
Ifλ
Ufλ
Z
Z
Z
Y
R
Z
Y
R
Şekil 2.3 Sargı eşdeğer şemaları
Z
DENEY 3
DOĞRU AKIM MOTOR
KARAKTERİSTİKLERİNİN ELDE
EDİLMESİ
I-GİRİŞ
Bu bölümdeki deneylerde, şönt ve seri uyarmalı doğru akım motorunun hız kontrol
karakteristikleri ve yük karakteristikleri incelenecektir.
II- DENEYİN YAPILIŞI
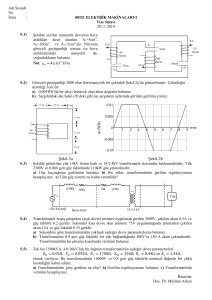
Şönt Motor Deneyleri
Deneyler süresince kullanılacak devre şeması, Şekil 1’de elektriksel ve Şekil 2’de montaj
planı olarak verilmiştir.
Şekil 1. Şönt motor deney şeması
Motora Yol Verme :
Şekil 1’deki devre, Şekil 2’deki montaj planı kullanılarak NE 7010 deney seti üzerinde
kurulur. ‘Field Regulator’ potansiyometresi %50 konumuna getirilir. Setin ana güç anahtarı
kaldırılarak enerji verilir ve ‘Supply Reset’ butonuna basılarak dahili besleme kaynakları
çalıştırılır. 0-220 V DC kaynağı anahtarı ‘1’ konumuna getirilir ve potansiyometre ile 200V’a
ayarlanır. Bu işlemden sonra ‘DC Starter’ yaylı potansiyometresini yavaşça ve sürekli olarak
saat yönünde çevirerek motora yol veriniz. Bu potansiyometre son konumuna gelince
kilitlenecektir. Makinanın ısınması ve okunacak değerlerin yerleşmesi için en az 5 dakika
bekleyiniz.
Test 1: Hız Kontrolü
a) Uyarma Akımını Değiştirerek: Motor ısındıktan sonra endüvi uç gerilimini, DC kaynak
potansiyometresini kullanarak U = 220V değerine getiriniz ve deney boyunca bu değerde
sabit tutunuz. Uyarma akımını Im=0.35A değerinden başlatmak üzere, her 0.05 A’lik artış
için devir sayısını okuyup kaydediniz (Artışlar tek yönde). Böylece uyarma akımı ile devir
sayısı arasındaki değişim elde edilmiş olur. Bir sonraki deney için motor uç gerilimi 220
V’a ve uyarma akımı 0.45 A değerine getirilir.
Im (A)
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
n(d/d)
b) Uç Gerilimini Değiştirerek : Şönt uyarmalı motorun uç gerilimi değiştirilerek devir
sayısı kontrol edilebilir. Bir önceki deneyde bırakılan noktadan hareketle, bu defa uyarma
akımı sabit tutularak uç gerilimi azaltılmıştır. Elde edilen değerler kaydedilerek uç
gerilimi ile devir sayısı arasındaki değişim elde edilir.
U (V)
220
200
180
160
140
120
n(d/d)
Ölçek : U için 20V = 15 mm, n için 100 d/d = 10mm, Orjin (100V, 700 d/d)
Test 2: Yük Karakteristiğinin Elde Edilmesi
Şönt motora yukarıda açıklandığı biçimde yol verilir ve U=160V değerine getirilir.
Generatörün uyarma sargısına gerilim verilerek (0-30V DC kaynak üzerinden) motor akımı I
= 4.5A değerine getirilir. Gerçekleştirilen bu ayarlar korunmak üzere (U, I = sabit) uyarma
akımı 0.25A değerinden itibaren tek yönde arttırılarak uyarma akımı ile devir sayısı
arasındaki değişim elde edilir. Bu değişim bir ölçek farkıyla yük momenti devir sayısı
değişimini verecektir.
Im (A)
0.25
0.30
0.35
0.40
0.45
0.50
0.55
0.60
n(d/d)
Ölçek : Im için 50mA = 10 mm, n için 100 d/d = 10mm, Orjin (0.2A, 800 d/d)
0.65
Şekil 2. Şönt motor deneyinde kullanılacak devrenin montaj planı
Seri Motor Deneyleri
Deneyler süresince kullanılacak devre şeması, Şekil 3’te elektriksel ve Şekil 4’te montaj planı
olarak verilmiştir.
Şekil 3. Seri Motor Deney Şeması
Motora Yol Verme :
Şekil 3’deki devre, Şekil 4’deki montaj planı kullanılarak NE 7010 deney seti üzerinde
kurulur. ‘0-30V DC Kaynak’ potansiyometresi %50 konumuna ve anahtarı ‘1’ konumuna
getirilir. Setin ana güç anahtarı kaldırılarak enerji verilir ve ‘Supply Reset’ butonuna basılarak
dahili besleme kaynakları çalıştırılır. 0-220 V DC kaynağı anahtarı ‘1’ konumuna getirilir ve
potansiyometre ile 200V’a ayarlanır. Bu işlemden sonra ‘DC Starter’ yaylı potansiyometresini
yavaşça ve sürekli olarak saat yönünde çevirerek motora yol veriniz. Bu potansiyometre son
konumuna gelince kilitlenecektir. Makinanın ısınması ve okunacak değerlerin yerleşmesi için
en az 5 dakika bekleyiniz.
Test 3: Hız Kontrolü
Seri motorun devir sayısı uç gerilimi değiştirilerek kontrol edilebilir. Motor ısındıktan
sonra uç gerilimi 120V değerine düşürülür ve bu değerden itibaren aynı yönde sürekli
arttırılır. Okunan devir sayıları ve uç gerilimi değerleri kaydedilir.
U(V)
120
140
160
180
200
n(d/d)
Ölçek : U için 20V = 15 mm, n için 100 d/d = 10mm, Orjin (100V, 900 d/d)
220
Test 4: Yük Karakteristiğinin Elde Edilmesi
Seri motora yukarıda açıklandığı biçimde yol verilir ve U = 200V değerine getirilir ve
deney süresince bu değerde sabit tutulur. Motorun çektiği akım (=uyarma akımı) ile devir
sayısı arasındaki değişim elde edilir. Bu değişim bir ölçek farkıyla yük momenti devir sayısı
değişimini verecektir.
I(A)
6.5
70
75
80
85
90
95
100
n(d/d)
Ölçek : Im için 50mA = 15 mm, n için 100 d/d = 10mm, Orjin (6A, 1000 d/d)
III- SONUCLARIN İNCELENMESİ
Tüm testler elde ettiğiniz değerlerin tablo altındaki ölçek değerlerine göre grafiklerini
çiziniz. Örneğin test 1-a için gerilim-hız karakteristiği U için 20V = 15 mm, n için 100 d/d =
10mm, Orjin (100V, 700 d/d) ölçeğinde çizilecektir.
Teorik olarak elde edilmiş karakteristikler ile pratikte elde ettiğiniz karakteristikler
arasında ne gibi farklar vardır, inceleyiniz.
Şekil 4 : Seri Motor Deneylerinde Kullanılacak Devrenin Simgesel Montaj Planı
DENEY 4
SENKRON MAKİNA DENEYLERİ
I-GİRİŞ
Bu bölümdeki deneylerde, senkron makinanın generatör ve motor çalışma durumundaki
karakteristikleri elde elde edilecek, şebeke gerilimi ile senkronizasyonu sağlanacaktır.
II- DENEYİN YAPILIŞI
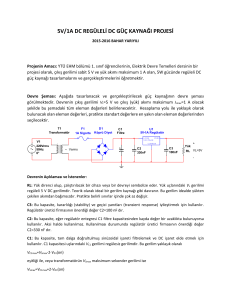
Senkron Generatör Deneyleri
Deney süresince kullanılacak devre şeması, Şekil 1’de elektriksel ve Şekil 2’de montaj
planı olarak verilmiştir.
Şekil 1 : Senkron Generatör Boşta Çalışma Deney Şeması.
Test 1: Boşta Çalışma Karateristiğinin Elde Edilmesi
Senkron generatörün, uyarma sargı akımı ile çıkış uç gerilimi arasındaki değişim boşta
çalışma karateristiğini verecektir. Şekil 1’deki devre şeması Şekil 2’deki montaj planı
yardımıyla kurulur. DC motora yol verilerek (bakınız Deney 4) devir hızı 1500 d/d değerine
ayarlanır. Uyarma akımı 0-30V DC kaynak gerilimi ile %0 - %100 arasında değiştirilir. Bu
işlem sırasında sürekli tek yönde hareket edilmelidir. Deney boyunca devir sayısında değişim
olmamalıdır (n = sabit).
%0
%10
%20
%30
%40
%50
%60
%70
%80
%90
%100
Im+(A)
V+(V)
Im-(A)
V-(V)
Çizim için ölçek : 25V = 10mm, 1A = 25mm
Test 2: Devir Sayısı-Gerilim Karakteristiğinin Elde Edilmesi
Bağlantılar değiştirilmeden, devir sayısı ile uç geriliminin değişimi elde edilecektir.
Bunun için senkron generatörün uyarma akımı Im = 2A değerine getirilir. Devir sayısı, şönt
motorun uyarma akımı ve uç gerilimi değiştirilerek istenen değerlere getirilebilir.
n(d/d) 800
900
1000
1100
1200
1300
1400
1500
1600
V(V)
Çizim İçin Ölçek : 100 d/d = 10mm, 10V=10mm, Orjin (800 d/d, 100V)
1700
Şekil 2.Montaj Planı
Test 3: Şebeke ile Senkronizasyon
Yüksüz olarak çalıştırılan senkron generatörün ürettiği gerilimin şebeke gerilimi ile
senkronize çalışması sağlanacaktır. Bunun için Şekil 3’teki montaj kurulur. Senkronizasyon
şartları sağlanarak senkronizasyon anahtarı kapatılır. Bu işlemler sırasında lambaların
değişimi, şebekeden çekilen veya verilen gücün değişimi gözlenir. Birkaç kez işlemler
tekrarlanarak meydana gelen olaylar gözlenir.
Şekil 3. Senkronizasyon deneyi montaj planı
Test 4: Motor Çalışma Durumu
Senkron makine bir önceki deneydeki gibi senkron hıza çıkartılıp senkronize
edildikten sonra, DC motor, DC Starter kullanılarak kapatılır. Böylece senkron motora yol
verilmiş olur. Senkron motorun uyarma akımını değiştirerek çektiği gücün aktif ve reaktif
bileşenlerinin değiştiğini gözleyiniz ve rezistif, 0.8 kapasitif ve 0.8 endüktif güç faktörleri için
uyarma akım değerlerini kaydediniz.
III- SONUCLARIN İNCELENMESİ
Tüm testler elde ettiğiniz değerlerin tablo altındaki ölçek değerlerine göre grafiklerini
çiziniz. Teorik olarak elde edilmiş karakteristikler ile pratikte elde ettiğiniz karakteristikler
arasında ne gibi farklar vardır, inceleyiniz.