Slide 1 - Ninova
advertisement

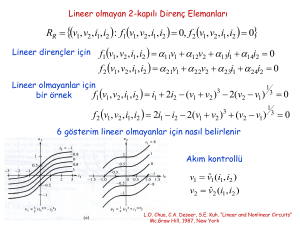
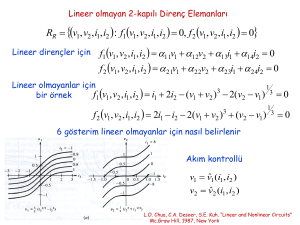
Lineer olmayan 2-kapılı Direnç Elemanları Hatırlatma RR v1, v2 , i1, i2 : f1v1, v2 , i1, i2 0, f2 v1, v2 , i1, i2 0 Lineer dirençler için f1 v1, v2 , i1, i2 11v1 12v2 13i1 14i2 0 f 2 v1, v2 , i1, i2 21v1 22v2 23i1 24i2 0 Lineer olmayanlar için 1 3 f1 v1, v2 , i1, i2 i1 2i2 (v1 v2 ) 2(v2 v1 ) 3 0 bir örnek f 2 v1, v2 , i1, i2 2i1 i2 2(v1 v2 ) (v2 v1 ) 3 1 3 0 6 gösterim lineer olmayanlar için nasıl belirlenir Akım kontrollü v1 vˆ1 (i1, i2 ) v2 vˆ2 (i1, i2 ) L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York Hatırlatma Gerilim kontrollü i1 iˆ1 (v1 , v2 ) i2 iˆ2 (v1 , v2 ) Hibrit1 v1 vˆ1 (i1, v2 ) i2 iˆ2 (i1, v2 ) L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York Hatırlatma Hibrit2 i1 iˆ1 (v1, i2 ) v2 vˆ2 (v1, i2 ) Transmisyon 1 Transmisyon 2 L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York npn Bipolar Tranzistör Emitör Alçak Frekanslardaki Eşdeğeri Ebers-Moll Denklemleri Kollektör Baz ie I ES e veb 1 vT ic F I ES e R I CS e veb 1 vT I CS e vcb 1 vT vcb 1 vT Parametreler: I ES , I CS , F , R ,VT I ES , ICS 1012 1010 A, F 0.99, R 0.5 0.8, VT ~ 25mV (25 C) Ebers-Moll Denklemleri ile verilen tranzistör nasıl bir eleman? 3-uçlu, gerilim kontrollü L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York 3-uçlu elemanın referansını baz yerine emitör olarak alırsak... vbe veb vce vcb veb ib (ie ic ) ib (1 F ) I ES e ic F I ES e vb e 1 vT vb e 1 vT Ebers-Moll denklemlerine yerleştir (1 R ) I CS e I CS e vb e vce 1 vT vb e vce 1 vT L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York Ortak emitör karakteristiklerinin parça parça lineer eşdeğeri Biraz daha basitleştirirsek.... L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York DC Çalışma Noktasının Belirlenmesi D1 D2 KGY+ KAY+ETB vbe E1 R1ib vce E2 R2ic Varsayım: E1 0, E2 0 D1 kısa devre, D2 açık devre vbe E0 ib ic ib vce ic 1 ( E1 E0 ) R1 ( E1 E0 ) R1 R2 E2 ( E1 E0 ) R1 L.O. Chua, C.A. Desoer, S.E. Kuh. “Linear and Nonlinear Circuits” Mc.Graw Hill, 1987, New York VbeQ E0 , I bQ E1 E0 , R1 VceQ E2 R2 ( E1 E0 ), I cQ ( E1 E0 ) R1 R1 Küçük İşaret Analizi • Çalışma noktasını belirle. • Lineer olmayan elemanın çalışma noktası civarında lineer eşdeğerini belirle. v1 vˆ1 (i1, i2 ) v2 vˆ2 (i1, i2 ) V1Q vˆ1 ( I1Q , I 2Q ) Akım kontrollü eleman tanım bağıntısı ~ v v1 ~ vˆ1 ( I1Q , I 2Q ) 1 i1 ( I1Q , I 2Q ~ v v2 ~ vˆ2 ( I1Q , I 2Q ) 2 i1 V2Q vˆ2 ( I1Q , I 2Q ) ~ v (i1 I1Q ) 1 i2 ) ( I1Q , I 2Q Çalışna Noktası (i2 I 2Q ) ... ( I1Q , I 2Q ) ~ v (i1 I1Q ) 2 i2 ) (i2 I 2Q ) ... ( I1Q , I 2Q ) v~1 v1 V1Q i1 v V v~ 2 2Q 2 i1 v~1 i2 v~2 i2 i1 I1Q i I 2Q 2 ( I1Q , I 2Q ) Jakobiyen Matrisi v~1 v1 V1Q i1 v V v~ 2Q 2 2 i1 v~1 v~1 i1 v~ v~ 2 2 i1 v~1 i2 v~2 i2 i1 I1Q i I 2Q 2 ( I1Q , I 2Q ) v~1 i2 v~2 i2 ~ i1 ~ i2 ( I1Q , I 2Q )