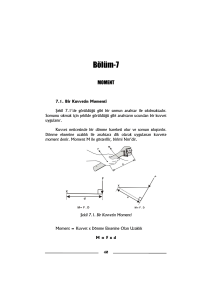
3-noktasal cismin dengesi
advertisement

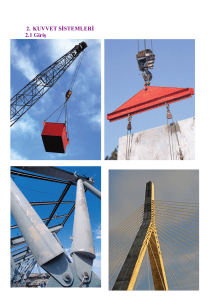
Noktasal Cismin Dengesi Bu bölümde; Kuvvetleri bieşenlerine ayırma ve kartezyen vektör şeklinde ifade etme yöntemleri noktasal cismin dengesini içeren problemleri çözmede kullanılacaktır. Bölüm 3 YRD.DOÇ.DR. KAMİLE TOSUN FELEKOĞLU 1 Noktasal Cismin Dengesi • Denge Koşulu: Bir maddesel noktaya etkiyen bütün kuvvetlerin bileşkesi sıfırsa maddesel nokta dengededir. • Bir parçacık, başlangıçta hareketsizken halen durağan halde bulunuyorsa veya başlangıçta hareketli iken halen sabit hıza sahipse dengededir. • “denge” veya “statik denge” ifadesi çoğu zaman durmakta olan bir nesneyi tanımlamak için kullanılır. 2 • Denge durumunu korumak için Newton’un birinci hareket kanununu sağlamak gereklidir: bir parçacık üzerine etkiyen bileşke kuvvet sıfır ise, parçacık dengededir. r ∑F = 0 • Bu formül denge için gerekli koşul olmakla kalmayıp, aynı zamanda yeterli koşuldur. Bu durum Newton’un ikinci hareket kanunu ile ortaya konur. r r ∑ F = ma r r ⇒ ma = 0 ⇒ a = 0 • Parçacık sabit hızla hareket etmekte veya durmaktadır 3 Serbest Cisim Diyagramı • Denge denklemini doğru uygulayabilmek için, parçacık üzerine etkiyen tüm bilinen ve bilinmeyen kuvvetleri hesaba katmak gerekir. Bunun için parçacığı çevresinden soyutlanmış ve serbest olarak gösteren bir şema çizilir. • Parçacık üzerine etkiyen tüm kuvvetleri gösteren bu çizime “serbest cisim diyagramı” denir. • Serbest cisim diyagramını çizerken kullanılan iki bağlantı tipi : – Yaylar – İpler ve makaralar 4 Yaylar • Mesnet olarak lineer elastik bir yay kullanılıyorsa, yayın uzunluğu, üzerine etkiyen kuvvet ile doğru orantılı olarak değişir. • Yayların elastikliğini tanımlayan : yay sabiti (k) F = ks s = l − l0 l0 = 0.4 m k = 500 N / m l = 0.6 m l = 0.2 m F = ks = (500 N / m)(0.6m − 0.4m) = 100 N F = ks = (500 N / m)(0.2m − 0.4m) = −100 N 5 İpler (Kablolar) ve Makaralar • Tüm kabloların ihmal edilebilir bir ağırlığa sahip ve uzayamaz olduğu kabul edilecektir. • Kablolar sadece çekme kuvveti taşırlar ve bu kuvvet daima kablo doğrultusunda etki eder. • Şekilde herhangi bir θ açısında, kablo uzunluğu boyunca sabit T gerilmesi oluşmaktadır. 6 Serbest Cisim Diyagramı Çizme Yöntemi Öncelikle yapılması gereken; Uygun bir parçacık belirlendikten sonra buna etkiyen kuvvetleri gösterebileceğimiz serbest cisim diyagramını basit bir şekilde çizmektir. 7 • 1.adım: parçacık çevresinden soyutlanarak, serbest kaldığı düşünülerek genel hatlarıyla çizilir. • 2.adım: parçacık üzerine etkiyen bütün kuvvetler gösterilir. Bu kuvvetler cismi hareket ettirmeye çalışan “aktif kuvvetler” ve/veya hareketi önleme eğilimi olan kısıtlamalar ve mesnetlerin neden olduğu “tepki (reaktif) kuvvetleri”dir. • 3.adım: bilinen kuvvetler uygun büyüklük (şiddet) ve doğrultularla (yön) işaretlenmelidir. Bilinmeyen kuvvetlerin şiddet ve yönü ise harfle gösterilir. • ∗ Bir kuvvetin etki çizgisi biliniyor, ancak yönü ve şiddeti bilinmiyorsa, kuvvet yönünü tanımlayan “ok ucu” varsayıma göre seçilir. Doğru yön şiddet bulunduktan sonra işaretlenir. Tanım gereği şiddet daima pozitiftir, çözüm negatif bir skaler verirse eksi işareti kuvvetin ucunun veya yönünün başta varsayılanın tersi yönde olduğunu gösterir. 8 Örnek 13 • C noktasının serbest cisim diyagramını çiziniz. 9 Düzlemsel Kuvvet Sistemleri r ∑F =0 → ∑F x =0 ∑ • x-y düzleminde bulunan kuvvetlerin dengede olması için vektörel toplamın “sıfır” olması gerekir. • Bu vektörel denklemin sıfıra eşit olması için x ve y bileşenleri sıfıra eşit olmalıdır. • Bu iki denklem en çok iki bilinmeyen kuvvetin bulunması için kullanılır. Fxiˆ + Fy ˆj = 0 • Denklemlerde kuvvetlerin yönleri de dikkate alınmalıdır. F =0 ∑ ∑ y 10 Skaler gösterim • Bileşenlerin gösteriminde skaler notasyon kullanılacaktır. Her bir bileşenin yönü serbest cisim diyagramında bileşenin ok yönüne karşı gelen bir cebirsel işaret ile ifade edilir. Bir kuvvet bileşeninin işareti bilinmiyorsa, alınan yön pozitif olur, çözüm negatif çıkarsa kuvvet yönünün ters olduğu anlaşılır. • Örneğin, ∑F x = 0 → + F + 10 = 0 → F = −10 N 11 Örnek 14 • D silindiri 60 kg’dır. BA ve BC kablolarında oluşan çekme kuvvetlerini bulunuz. 12 13 Örnek 15 BA, BC ve CD kablolarında oluşan kuvvetleri ve θ açısını bulunuz. (B lambası 10 kg, C lambası 15 kg) B noktasında; ∑ Fy = 0 ; TBA sin 15 − 10(9.81) N = 0 TBA = 379.03N ∑ Fx = 0 ; TBC − 379.03 N cos15 = 0 TBC = 366.11N C noktasında; ∑ Fx = 0 ; TCD cos θ − 366.11N = 0 ∑ Fy = 0 ; TCD sin θ − 15(9.81) = 0 TCD = 395 N θ = 21.9o Örnek 16 • 8 kg’lık lambanın şekildeki gibi taşınabilmesi için AC kablosunun uzunluğu ne olmalıdır? • l’AB=0.4 m (deforme olmamış boy) 15 16 Örnek 17 W • Şekilde gösterilen kablolarda 0.5 kN’un üzerinde çekme kuvveti oluşmaması için asılı olan kovanın ağırlığını (W) bulunuz. 17 E noktasının SCD’ı 3 → ∑ Fx = 0 FED . cos 30 − FEB ( ) = 0 5 FED = 0.693FEB + 4 ↑ ∑ Fy = 0 FED . sin 30 + FEB ( ) − W = 0 5 0.8FEB + 0.5(0.693FEB ) = W FEB = 0.872W 1 B noktasının SCD’ı 3 → ∑ Fx = 0 FBC . cos 30 + FBE ( ) − FBA = 0 5 4 ↑ ∑ Fy = 0 FBC . sin 30 − FBE ( ) = 0 5 0.5FBC = 0.8 FBE = 0.8 × 0.872W + FBC = 1.395W 2 1.395W (cos 30) + 0.6(0.872W ) = FBA FBA = FAB = 1.731W 3 0.5 = 1.731W W = 0.289kN FED = 0,693 × 0,289 = 0,2kN FBE = 0,872 × 0,289 = 0,252kN FBC = 1,395 × 0,289 = 0,403kN FBC = 1,731× 0,289 = 0,5kN En riskli durum [3] Üç Boyutlu Kuvvet Sistemleri • Parçacık dengesinin sağlanması için: • Parçacık üzerine etkiyen kuvvetler i, j, k bileşenlerine ayrılırsa: Bu denklemler, parçacığa etkiyen x, y, z kuvvet bileşenlerinin cebirsel toplamlarını göstermektedir, “0”dır. Bu denklemler ile en fazla 3 bilinmeyen kuvvet bulunabilir. 20 Örnek 18 40 N’luk sandığı taşımak için kullanılan kablolarda oluşan kuvvetleri bulunuz. 21 rAB = −0,75iˆ − 1 ˆj + 2kˆ r = −0,75iˆ + 1 ˆj + 2kˆ A (0; 0; 0) rAD = iˆ C (-0.75; 1; 2) AC B (-0.75; -1; 2) r − 0,75iˆ − 1 ˆj + 2kˆ FAB = FAB = −0,318FAB iˆ − 0,424 FAB ˆj + 0,848 FAB kˆ (−0,75) 2 + ( −1) 2 + (2) 2 − 0,75iˆ + 1 ˆj + 2kˆ v FAC = FAC = −0,318 FAC iˆ + 0,424 FAC ˆj + 0,848 FAC kˆ (−0,75) 2 + (1) 2 + ( 2) 2 r F AD= FAD iˆ W = (−40kˆ) N r ∑F =0 r r r FAB + FAC + FAD + W = 0 − 0,318FABiˆ − 0,424FAB ˆj + 0,848FAB kˆ − 0,318FACiˆ + 0,424FAC ˆj + 0,848FAC kˆ + FADiˆ − 40kˆ = 0 ∑ Fx = 0 − 0,318FAB − 0,318FAC + FAD = 0 ∑ Fy = 0 − 0,424 FAB + 0,424 AC = 0 ∑ Fx = 0 + 0,848FAB + 0,848FAC − 40 = 0 F AB= FAC = 23,6 N FAD = 15 N 22 Örnek 19 90 lb’lik yük şekildeki kancada asılıdır. Yük iki ip ve k=500lb/ft katsayılı yay ile tutulmaktadır. Denge durumunda, iplerdeki kuvveti ve yayın gerilme miktarını belirleyiniz. (AD ipi x-y düzleminde, AC ipi x-z düzlemindedir.) Önce serbest cisim diyagramını çizelim: Örnek 20 Şekilde görülen 100kg’lık kutu, birine yay bağlanmış üç iple tutulmaktadır. Her bir ipteki çekme kuvvetini ve yayın gerilme miktarını belirleyiniz. Serbest cisim diyagramı: D (-1, 2, 2) F=ks 693.7=1500s s=0.462m Kuvvet Sistemleri • Bir kuvvetin bir nokta veya eksene göre momentinin bulunması • Bir noktadan geçmeyen kuvvet sistemlerinin bileşkelerinin bulunması • Kuvvet çiftinin oluşturduğu momentin bulunması • İki ve üç boyutlu kuvvetler için moment hesaplanması • Moment bir cismi döndürmeye çalışır, denge ise cismin dönmemesini gerektirir. • Bir cisme bir kuvvet uygulandığında, cismi etki çizgisinin dışında bir nokta etrafında döndürmeye çalışır. Bu döndürme eğilimine “tork” veya daha sık kullanıldığı şekliyle “moment” denir. 27 Bir kuvvetin momenti • Bir kuvvetin bir noktaya veya bir eksene göre momenti (M), kuvvetin cismi o nokta veya eksen etrafında döndürme eğiliminin bir ölçüsünü gösterir. M0 = F . d • Momentin şiddeti, F kuvvetinin şiddeti ile orantılıdır ve F kuvvetine dik olan moment kolu d ile orantılıdır. • (b)’de moment kolu daha kısa ! d’=dsinθ (d’<d) • (c)’de θ=0 d’=0 M=0 28 • Moment daima F ve d’yi içeren düzleme dik bir eksen etrafında etkimektedir. Ve bu eksen düzlemi, “O” noktasında kesmektedir. • Şiddeti “M0 = F . d ” olan momentin doğrultusu sağ el kuralı kullanılarak belirlenir. 29 Bileşke Moment • Bir kuvvet sistemi x-y düzleminde yer alırsa, her bir kuvvetin O noktasına göre momenti z ekseni yönünde olacaktır. • Sistemin bileşke momenti, bütün kuvvetlerin momentlerinin cebirsel toplamı alınarak bulunabilir, çünkü bütün moment vektörleri aynı doğrultudadır. • Moment saatin tersi yönündeyse (+), saat yönündeyse (-) • Sağ el kuralına göre baş parmak sayfa düzleminin dışına doğru (+z ekseni) ise (+), içine (-z ekseni) doğruysa (-) 30 Örnek 21 31 Örnek 22 Etkiyen dört kuvvetin O noktasında oluşturduğu bileşke momentin değerini bulunuz. Pozitif moment yönü, +k yönünde, yani saatin tersi yönünde olduğu kabulü ile: 32 • F kuvveti her zaman dönme etkisi yaratmayabilir. F kuvveti A noktasında MA=F.dA momenti kadar döndürmeye çalışıyor, ancak gerçek döndürme etkisi B mesnetinin kaldırılması halinde oluşur. • Çiviyi çıkarmak için FH kuvvetinin O noktasında yaratmış olduğu momentin, FN çivi kuvvetinin yaratmış olduğu momentten büyük olması gerekir. 33 Vektörel çarpım (çapraz çarpım) • Bir kuvvetin momenti, kartezyen vektörler kullanılarak ifade edilebilir. Bundan önce vektör çarpımında kullanılacak olan çapraz çarpıma bakalım. A ve B vektörlerinin vektörel (çapraz) çarpımı sonucu C vektörü elde edilir. r r r C = A× B • C vektörünün şiddeti de şu şekilde bulunabilir: C = AB sin θ 34 • YÖN: C vektörünün yönü, A ve B vektörlerinin bulunduğu düzleme diktir. Sağ el kuralı ile belirlenir. • Parmaklarımızı A’dan B’ye doğru kıvırdığımızda başparmağımızın gösterdiği yön C vektörünün yönünü gösterir. • C vektörünün yönü, uc birim vektörüyle karakterize edilebilir. r r r r C = A × B = ( AB sin θ ) uc 35 Vektör çarpım kuralları Skaler ile çarpım her durumda şiddet aynı doğrultu aynı Dağılma özelliği 36 Kartezyen vektör formülasyonu • Kartezyen birim vektörlerinin çapraz çarpımlarını bulmak için: • A ve B vektörlerinin vektörel çarpımı : • Bu terimler düzenlenirse : 37 Kartezyen vektör formülasyonu • Vektörel çarpım, determinant formunda da ifade edilebilir. Bu determinant (3 satır ve 3 kolona sahip) üç minör kullanılarak hesaplanır. Determinant hesabı için minörlerin bulunması Bu üç bileşen toplanır ve determinant bulunur : 38 Bir kuvvetin momenti: Vektör formülasyonu Bir kuvvetin bir noktaya göre momenti r r r M0 = r × F O noktasında F kuvvetinin etki çizgisinin herhangi bir yerine olan pozisyon vektörü Vektörel çarpım ile belirlenen moment doğru şiddet ve doğru yöne sahip olacaktır. 39 Şiddet r r r M0 = r × F ⇒ M 0 = rF sin θ = F (r sin θ ) = Fd θ = r ve F vektörleri arasındaki açı d = dik mesafe Yön Sağ el kuralına göre momentin yönü belirlenir. 40 Taşınabilirlik ilkesi Vektörel çarpım işlemi, üç boyutlu problemlerde sıklıkla kullanılır. Çünkü kuvvetin etki çizgisinden O noktasına olan dik mesafeyi bulmaya gerek yoktur. O noktasından F kuvvetinin etki çizgisinin herhangi bir yerine ölçülen r vektörü moment hesabı için kullanılabilir. r r r r r r r M 0 = r1 × F = r2 × F = r3 × F F kuvveti etki çizgisinin herhangi bir yerine etkiyebilir, ve O noktasında aynı moment etkisini yaratır. 41 Momentin kartezyen vektör formülasyonuna göre bulunması + − + Konum vektörü bileşenleri Kuvvet vektörü bileşenleri 42 • Bir kuvvet sisteminin bileşke momenti r r r M r 0 = ∑ ri × Fi Bir kuvvet sisteminin O noktasına göre bileşke momenti şöyle bulunur: i 43 Örnek 23 • O noktasında oluşan moment değerini ve yönünü bulunuz. r r r M r 0 = ∑ ri × Fi i 44 45 46 Örnek 24 F kuvveti tarafından O noktası etrafında oluşturulan momenti kartezyen vektör olarak ifade ediniz. A ( 0, 0, 12) B( 4, 12, 0) 1.yol 2.yol