SENKRON MAKİNA
advertisement

SENKRON MAKİNA
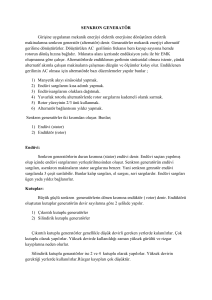
Senkron makinenin rotor sargıları (alan sargıları) harici bir kaynak vasıtası ile fırça-bilezik
sistemi üzerinden DC akım uyartımına tabi tutulur. Rotor sargıları türbin kanatları tarafından
mekaniksel olarak döndürülür. Alan sargıları tarafından üretilen döner manyetik alan stator
sargılarında gerilim indükler. Stator sargılarında indüklenen gerilimin frekansı rotor hızı ile
eşzamanlıdır.
Senkron generatörün rotoru yukarıda ifade edildiği gibi DC-uyartımlı elektromıknatıs
olabileceği gibi sabit mıknatıslı da olabilir.
Er
+
_
N
Fr
wm
+
DC
_
+
Et _
S
+
_ Es
Şekil. Senkron generatörün prensip iç yapısı ve çalışma prensibi
Kanatlar
Fırçalar
Uyartım
Sistemi
Bilezikler
AC
Şebekeden
3 Faz
AC Çıkış
Dişli
Kutusu
Şekil. Senkron generatörlü rüzgâr türbini ve uyartım sistemi
Senkron makinenin basit eşdeğer devresi aşağıda verildiği gibidir.
X
wm
R
I
+
V
DC
Eg
Şekil. Senkron generatörün basit eşdeğer devresi
Senkron generatörün stator sargılarında üretilen
⌊
gerilimi ile uç gerilim
(
)
⌊
Stator sargı direnci , reaktansa göre çok küçük olduğundan ihmal edilirse,
⌊
olarak yazılır. Böylece akımı;
⌊
⌊
⌊
arasındaki eşitlik
Not: Burada
uç gerilimi referans gerilim olarak alınmıştır.
Burada, türbin kanatları tarafından yakalanan mekanik güç senkron generatörün rotoruna
uygulanır. Rotor milinde oluşan moment (
) rotorun ivmelenmesine neden olur.
Böylece rotor kutupları, aşağıdaki şekilde gösterildiği gibi statordaki döner manyetik alanın
önüne geçer ve oluşan stator manyetik alanı rotor üzerinde teğetsel manyetik bir kuvvete
neden olur. Böylelikle statorun
kutbunu çeker ve mekanik
kutbu daha ileride olan rotorun
güç elektriksel güce çevrilmiş olur.
N
N
S
N
S
w
d
S
w
N
S
Şekil. Senkron generatörün boşta ve yükte çalışma durumunda
rotor açısının oluşması
Açısal hız, şebeke frekansının ve makine kutup sayısının bir fonksiyonu olarak aşağıdaki gibi
ifade edilir.
Senkron makineler hem sabit hızda hem de değişken hızda işletilebilirler. Sabit hızda
işletimde, stator sargıları şebekeye bağlı olan senkron generatör açısal hızı şebeke frekansı
tarafından ve makine uç gerilimi de şebeke gerilimi tarafından kontrol edilir. Sabit hız
işletimini anlayabilmek için doğrudan şebekeye bağlı (güç dönüştürücüsüz) senkron
generatörlü rüzgâr türbinini dikkate alalım. Senkron generatörün şebekeye bağlı olduğu bara
sonsuz güçlü bara özelliği göstereceğinden makine uç gerilimi
, şebeke gerilimi ile aynı
olacağından sabit kalacaktır. Yukarıda resmedilen senkron makine eşdeğer devresi dikkate
alınırsa, senkron makineye ilişkin aşağıdaki güç ifadeleri yazılabilir.
Bu durumda türbin kanatlarına çarpan rüzgâr hızı için iki ihtimali dikkate alalım. Birinci
durumda rüzgâr hızının sabit kaldığını, yani üretilecek aktif gücün sabit kaldığını düşünelim.
Bu durumda fazör diyagramında gösterildiği gibi uyarmanın
den
değerine getirildiğini
kabul edelim. Sonsuz güçlü şebeke ile paralel çalışan senkron makinenin gücü ve gerilimi
sabit kalacağından, yukarıdaki eşitliklerden
kalacaktır. Fazör diyagramından da anlaşılacağı üzere
gerilimi de
değerleri de sabit
ve
akımı
sınırları içinde kalırken
sınırları içerisinde kalır.
k1
Iı
E gı
qı
dı
Eg
jIX
ı
jI X
d
k2
V
q
I
Şekil. Şebeke ile paralel çalışan sabit hızlı senkron generatörde uyartım akımının
değiştirilmesi
Aynı işletim şartlarında rüzgâr hızının
durumda üretilen güç de
rotor açısı olup
den
den
değerine yükseldiğini düşünürsek, bu
değerine yükselecektir. Burada değişen tek parametre
değerinde sürekli sabit kalacak şekilde dairesel bir yörünge izler.
E gı
jIıX
Eg
dı
jIX
d
q
V
qı
Iı
I
Şekil. Şebeke ile paralel çalışan sabit hızlı senkron generatörde rüzgâr hızı artışının etkisi
Değişken hızlı senkron makine şebekeye doğrudan bağlı olmayıp güç dönüştürücüleri
üzerinden şebekeye bağlıdır. Bu dönüştürücüler değişken frekans ve genlikteki gerilimi, sabit
frekans ve genliğe dönüştürür. Değişken hızlı senkron generatörler türbin kanatlarına ya
doğrudan bağlıdır, ya da basit bir dişli ünitesi üzerinden bağlıdır. Burada türbin ve generatör
rotor hızı rüzgâr hızı ile birlikte değişir.
Senkron makinenin 3 faz görünür gücü,
Burada akımı,
⌊
⌊
⌊
akımının eşleniği ise,
(
(
)
)
(
(
ihmal edildiğinden dolayı
)
alınırsa, 3 Fazlı kompleks güç;
{
[
)
(
)
[
(
(
⌊
)
}
)
)
[
⌊(
]
(
)
(
]
)]
Aktif güç,
Reaktif güç ise
(
)
olarak hesaplanır. Rotor milinde oluşan moment ise,
Yukarıdaki eşitlik sabit hızda işletilen senkron generatör için dikkate alınırsa, güç-yük açısı
karakteristiği aşağıda verildiği gibidir.
Sin dalgasının genliği
büyür (Eg>V)
Kapasitif Yükleme
P
Pmax
Eg=V
Güç Faktörü =1
Sin dalgasının
genliği küçülür
(Eg<V)
Endüktif Yükleme
Kararsız
Bölge
Kararlı
Bölge
0
90
180
Rotor Açısı (Yük Açısı)
Şekil. Senkron generatörün güç-yük açısı karakteristiği
Senkron generatörler güç dönüştürücüleri üzerinden şebekeye bağlanırsa, rüzgârdaki
rastlantısal değişkenliğe paralel olarak değişken hızda işletilirler. Sabit hızda işletilen senkron
generatörler sadece tek bir rüzgâr hızında en verimli noktada çalışabilirken, değişken hızlı
senkron generatörler nominal hızın altındaki bütün rüzgâr hızlarında en verimli noktayı
yakalayabilir.
v=15 m/s
Pnom
Sabit hızlı
türbin
Değişken
hızlı türbin
Rotor Gücü, P
vnom=13 m/s
v=11 m/s
v=9 m/s
v=7 m/s
v=6 m/s
v=5 m/s
v=4 m/s
Rotor Hızı, n
Değişken hızlı senkron generatörü analiz edebilmek için kutup çifti sayısı
mıknatıslı senkron generatörü dikkate alalım. Rotor açısal hızının
olan sabit
olması durumunda stator
sargılarında indüklenen gerilim,
Burada
katsayısı, generatördeki mıknatısının manyetik alan şiddetine göre değişen sabit bir
katsayıdır. Şebekeye doğrudan bağlı sabit hızlı bir senkron makinenin uç gerilimi
şebeke
gerilimi olup değeri bilinmektedir. Değişken hızlı senkron makinede ise uç gerilim
değişken frekanslı bir gerilim olup, bu gerilim
akımı ile birlikte doğrultucunun giriş
işaretlerini oluşturur.
Değişken hızlı
türbin
AC
ŞEBEKE
Senkron
Generatör
Vg
Vdc
Vac
Ig
Idc
Iac
Senkron makine basit eşdeğer devresi dikkate alınarak çevre denklemi,
⌊
(
)
⌊
yazılabilir. Yukarıda elde edilen eşitliklere paralel olarak gerilim, güç ve moment ifadeleri
(
Burada
(
)
ihmal edildiğinden
)
dir. Moment değeri
eşitliği kullanılarak
hesaplanabilir. Doğrultucu çıkışından elde edilen DC akım ve gerilim değeri,
√
√
olarak yazılır. Konverter kayıpları ihmal edilirse, DC güç çıkışı ile değişken işaretli senkron
makine AC güç çıkışı birbirine eşit olur.
RÜZGÂR ENERJİ SANTRALLERİNİN ŞEBEKEYE ENTEGRASYONU
Özellikle büyük ölçekli rüzgâr çiftliklerinin ulusal elektrik enerji sistemleri işletimi üzerinde
önemli etkileri olabilir. Bu nedenle rüzgâr türbinlerinin şebekeye bağlantı ölçütlerinin iyi
derecede etüt edilmesi gereklidir. Bu ölçütleri aşağıdaki konu başlıkları için sıralamak
mümkündür:
1. Frekans ve Aktif Güç Kontrolü
2. Kısa devre gücü ve gerilim değişimleri/dalgalanmaları
3. Reaktif güç kontrolü
4. Gerilim kırpışması
5. Harmonikler
6. Kararlılık
Rüzgâr türbinleri orta ve yüksek gerilim sistemlerine genellikle bir transformatör aracılığı ile
bağlanır. Arıza durumunda rüzgâr türbinini şebekeden ayırmak amacıyla koruma sistemlerine
ihtiyaç vardır. Koruma sistemi şebeke gerilimi ve frekansını korumak için aşağıdaki durumlar
oluşmadan önce sistemi açmalıdır:
1. Gerilim yükselmesi tek faza ilişkin gerilim seviyensin %15’ine ulaşmadan önce,
2. Gerilim düşümü %30 seviyelerine ulaşmadan önce,
3. Frekans sapması
2 Hz seviyesine ulaşmadan önce.
Rüzgar türbinlerinin şebeke bağlantısı aynı zamanda gerilim dalgalanmalarına neden olur. Bu
gerilim dalgalanması %2’lik seviyeyi geçmemelidir.
Bir güç sistemi analiz edilirken yükler, iletim hatları ve transformatörler
empedansı ile
temsil edilebilirler. Herhangi bir empedans üzerinden bir akım akışı söz konusu ise
empedansın öncesi ve sonrasındaki noktalarda oluşan gerilimleri
ve
ile gösterelim.
Z
V1
V2
Şekil 1. I akımı altında Z empedansının her iki ucundaki gerilimler (
Şekil 1.’e göre
empedansı üzerindeki gerilim düşümü
ve
)
olup, Şekil 2.’de bir
rüzgar türbininin şebeke ile paralel çalışması durumu ile ilgili temel problem
resmedilmektedir. Şekil 3.’te ise rüzgar türbin sistemi ile şebeke bağlantısı fazörel olarak
gösterilmiştir. Burada şebeke
empedansı ve
gerilim kaynağı ile temsil edilmiştir. Rüzgar
türbininin bağlandığı noktadan aynı zamanda yerel yüklerde beslenmektedir.
Z2=R+jX
Pw + jQw
I
X
Iw
Vw
V1
Rüzgar
Türbini
Şebeke
PL + jQL
Şekil 2. Bir rüzgar türbinine ilişkin şebeke bağlantısı
V2
ΔV
ΔVq
d
V1
ΔVp
Şekil 3. Rüzgar türbin sistemi ile şebeke bağlantısının fazörel olarak gösterilmesi
Rüzgar türbininin şebekeye bağlandığı noktadaki kısa devre gücü,
aşağıdaki denklem ile verilebilir.
(1)
Bir elektrik şebekesinde verilen bir noktanın kısa devre gücü şebekenin o noktadaki performansının
bir ölçüsünü gösterir. Kısa devre gücünün aynı zamanda gerilim kalitesi üzerinde de etkisi söz
konusudur. Rüzgar hızındaki değişiklik, rüzgar türbini güç üretiminde değişikliğe, güç üretimindeki
değişiklik ise
ise
empedansı üzerinden akan akım miktarında değişikliğe neden olur. Bu akım değişimi
geriliminde değişikliğe neden olur. Eğer zayıf bir şebekede (kısa devre gücü küçük)
empedansı büyük ise gerilim dalgalanmaları büyük olur. Güçlü bir şebekede (kısa devre gücü büyük)
empedansı küçük ise gerilim dalgalanmaları da küçük olur. [Not: Bir şebekenin bozucu etkilere karşı
kararlılığını sürdürebilme kabiliyeti kısa devre gücü ile doğrudan ilgili olup, güçlü veya zayıf şebeke
tabiri daha çok kurulu rüzgar gücü ile ilgili olarak kullanılır.]
Rüzgar türbininin ürettiği kompleks güç Sw = Pw + jQw ile temsil edilir ise, dönüştürücüler sonrası
şebekeye inverter üzerinden aktarılan AC çıkış gücü
türbinin şebekeye vereceği akım, (Sw>SL için)
(
(
)
)
(
)
(2)
Sistem ile bağlantı noktası arasındaki gerilim farkı,
(
(
[
(
)
(
)
) (
)
]
[
(
)
olduğundan,
(
(
)
)
)
(3)
]
(4)
Yukarıdaki denklem sisteme transfer edilen güç ile gerilim arasındaki ilişkiyi gösterir. Burada
güç
akış yöntemleri ile veya farklı simülasyon teknikleri ile hesaplanabilir. Yukarıdaki (1-3) denklemleri
kullanılarak
gerilimi hesaplanabilir. Böylece rüzgâr güç üretiminin
üzerindeki etkisi doğrudan
analiz edilebilir.
1.7. RÜZGÂR GÜÇ SİSTEMİ TOPOLOJİLERİ
1.7.1 DOĞRU AKIM GENERATÖRLERİNİ KULLANAN TOPOLOJİ
DC YÜK
+
Ptürbin
DC GENERATÖR
-
DİŞLİ
KUTUSU
RÜZGAR
1.7.2 ASENKRON GENERATÖRLERİNİ KULLANAN TOPOLOJİ
Temel olarak enerji dönüşüm sistemlerinde kullanılan asenkron generatörler 3 çeşittir.
Bunlar sincap kafesli, bilezikli (rotoru sargılı) ve çift beslemeli asenkron generatörlerdir.
Sincap kafesli asenkron makine bir ac sisteme doğrudan bağlanıp sabit hızda işletilebileceği
gibi güç elektroniği üniteleri ile birlikte değişken hızlarda da işletilebilir. Bilezikli asenkron
generatörler ise kayma kontrolünü sağlayan rotor dirençleri ile birlikte bir ac sisteme
doğrudan bağlanabilirler. Burada kayma kontrolü ile işletim hızı ancak belirli hız aralıklarında
ayarlanabilir. Çift beslemeli asenkron generatör ise güç elektroniği dönüştürücülerinin
boyutuna bağlı olarak çok daha geniş aralıklarda hız ayarlama imkânı verir.
1.7.2.1. ŞEBEKEYE DOĞRUDAN BAĞLI ASENKRON GENERATÖR
Şebekeye doğrudan bağlı asenkron generatörler küçük ve orta ölçekli rüzgâr türbinlerinde
kullanılmaktadırlar. Bir dişli kutusu rotor kanatlarının hızını ayarlar. Bu durumda asenkron
generatör senkron makine da olduğu gibi şebekeyle senkronize olmak zorunda değildir.
İşletim hızına ilave bir kontrole ihtiyaç duymaksızın ulaşır. Ancak generatör boyutu
büyüdükçe, bu makineler şebekeye bağlantı esnasında oldukça yüksek bir başlangıç akımına
neden olurlar. Moment kontrolü bu başlangıç akımını sınırlandırabilir.
ŞEBEKE
Kanatlar
Reaktif Güç
Kompanzasyonu
Asenkron
Generatör
Transformatör
Dişli
Kutusu
Şekil: Şebekeye doğrudan bağlı asenkron generatör (Not: Asenkron makineler reaktif güce
ihtiyaç duyarlar. Bu ihtiyacı karşılamak amacıyla şekildeki gibi reaktif güç kompanzasyonu
uygulanabilir.)
Rotorda stall regülâsyonu yüksek rüzgâr hızlarındaki gücü kısıtlar. Rüzgâr hızları değiştikçe
kayma değiştiğinden, bu generatörlerin hızı, rüzgâr hızı değiştikçe değişmektedir. Dolayısı ile
bu makineler hızlı değişen dalgalanmaları azaltabilir. Asenkron rüzgâr generatörleri sırasal hız
değişimleri arasında yaklaşık %10’luk bir değişime müsaade eder. Bununla beraber,
kaymanın yükselmesi ile kayıplar artacak, yani verim düşecektir. Bu nedenle modern
uygulamalarda değişken kayma (s) özelliğine sahip asenkron makineler kullanılır. Bu
generatörlerde sargı uçları kısa devre edilmiş kafes rotorlar kullanılmaz. Buna mukabil
kontrol edilebilir değişken dirençli rotor devreleri yer alır. Rotor sargıları ya harici değişken
bir dirence bilezikler vasıtasıyla bağlıdır, ya da rotor ile birlikte dönen kontrol edilebilir bir
dirence bağlıdırlar.
Aşağıdaki şekilde rotor sargılarına ayarlanabilen direnç bağlı bir asenkron makine ve hızmoment karakteristiklerindeki değişim verilmiştir.
0
Şebeke
Stator
Uçları
20
RR>0
40
M/Mmax [%]
Asenkron
Generatör
60
80
RR=0
Rotor
Uçları
100
120
RRotor
-1
-0,8
-0,6
-0,4
-0,2
0
Kayma, s
Şekil x: Rotor direncinin değişmesi ile kayma-moment değişimi arasındaki ilişki
Maksimum moment (Mmax) direncin artması ile birlikte yüksek kayma değerlerinde oluşur.
Güç ise moment ile orantılı olduğundan yüksek hızlarda güç artar ve güç dalgalanmaları
azalır. Aşağıdaki şekilde rotor hızı ile rotor gücü arasındaki ilişkiyi vermektedir.
TSR
2R
n,
v
konabilir. Not: P
formülü dikkate alındığında gücün rotor hızı ile olan ilişkisi ortaya
1
Av 3 c p ve c p f ( ) ve f (n dev / dk ) .
2
Stator frekansı ve dişli kutusu rotor hızını belirler, ve bu değer ancak kaymaya bağlı olarak
değiştirilebilir (Şekil x).
Aşağıdaki şekilde şebekeye doğrudan bağlı asenkron generatörlü bir rüzgâr türbininin güç-hız
karakteristiği verilmiştir.
Rotor Gücü, P
DEĞİŞKEN
KAYMA
ASENKRON GENERATÖR
v 13m / s
v 12m / s
v 11m / s
v 11m / s
Rotor Hızı, n
Şekil xx: şebekeye doğrudan bağlı asenkron generatörlü bir rüzgâr türbininin güç-hız
karakteristikleri
Görüldüğü üzere, eğer rotor hızı sabit kalırsa, türbin hiçbir zaman optimal güç üretimine
ulaşamaz. Bu nedenle en uygun üretim için rotor hızı (elektriksel hız) farklı rüzgâr hızları için
farklı hızlarda olmalıdır.
1.7.2.2. DEĞİŞKEN HIZ KONTROLLÜ ASENKRON GENERATÖRLER
Şebekeye doğrudan bağlı asenkron generatörlerde görüldüğü üzere değişken kayma özelliği
generatörün hızını değiştirebilir. Ancak yüksek kayma oranı, rotorda yüksek kayıplara neden
olacağından, kayma miktarının %10 seviyelerini geçmemesine dikkat edilir. Bununla birlikte
rotor gücü şebekeye aktarılarak generatör hız kontrolü için kullanılabilir. Eğer generatör hızı
sadece şebeke frekansından daha yüksek hızlara ulaşacak ise, bu durum için kullanılacak
devre senkron üstü (oversynchronous convertor) kaskad konvertör olarak adlandırılır. Bu
devrenin enbüyük dezavantajı, yüksek reaktif güç talebidir.
Kaskad Konverter
ŞEBEKE
Kanatlar
Reaktif Güç
Kompanzasyonu
Asenkron
Generatör
Transformatör
Dişli
Kutusu
Şekil xxx: Kaskad konverterli değişken hız kontrollü asenkron generatör.
Senkron üstü (oversynchronous convertor) kaskad konvertör sadece rotor gücünü şebekeye
aktarabilirken çift beslemeli (double-fed) asenkron generatör her iki yönde de güç
transferine imkan tanır (rotordan şebekeye ve şebekeden rotora). Bu amaçla direkt olarak
bağlı bir AC/AC konverter kullanılabilir (şekil 4x).
AC-AC konverter
ŞEBEKE
Kanatlar
Asenkron
Generatör
Transformatör
Dişli
Kutusu
Şekil 4x: çift beslemeli AC/AC konverterlü (double-fed) bir asenkron generatör
Çift beslemeli bir asenkron generatör hem senkron üstü, hem de senkron altı hızda
işletilebilir. Böylelikle generatörün reaktif güç ihtiyacı kontrol edilebilir. Bu sistemin
dezavantajı yüksek maliyati ve nerji kalitesi ile ilgili problemlere neden olmasıdır.
1.7.3. SENKRON GENERATÖRLERİNİ KULLANAN TOPOLOJİ
1.7.3.1. ŞEBEKEYE DOĞRUDAN BAĞLI SENKRON GENERATÖR
Senkron makineler uyarma akımları kontrol edilmek sureti ile hem reaktif güç üreticisi hem
de reaktif güç tüketicisi olabilir. Yani reaktif güç talepleri kontrol edilebilir. Senkron
makineleri uyarmak için sabit mıknatıslarda kullanılabilir. Ancak bu durumda senkron
makinelerin reaktif gücü kontrol edilemez.
Uyarma
ŞEBEKE
Kanatlar
Senkron
Generatör
Transformatör
Dişli
Kutusu
Şekil 5x: Şebekeye doğrudan bağlı senkron generatör
Asenkron generatörün aksine, senkron generatör sabit hızda işletilir. Bu durum ise rüzgâr
türbinlerinde oldukça zor bir durumdur. Bu nedenle doğrudan bağlantılı senkron
generatörler ada şebeke uygulamalarında bağımsız (stand-alone) uygulamalar için
kullanılırlar. Bu makinenın şebekeye direkt olarak bağlanısı neticesinde oluşacak bir diğer
mahsur ise şebekedeki yük değişimlerinin generatör üzerinde yüksek mekanik zorlamalar
oluşturmasıdır. Bu nedenlerden ötürü senkron makineler genellikle şebekeye direkt olarak
bağlanmazlar.
1.7.3.2. DC BARA BAĞLANTILI SENKRON GENERATÖRLER
DC bara bağlantılı senkron generatörler (frekans konvertörlü senkron makinalar da
denmektedir) şebekeye doğrudan bağlı senkron generatörlerin dezavantajlarını ortadan
kaldırabilir.
Uyarma
ŞEBEKE
Kanatlar
Senkron
Generatör
Transformatör
Dişli
Kutusu
Şekil 6x: DC bara bağlantılı senkron generatörler
Şekil 7x de görüldüğü üzere düşük ve orta hızlı tüm rüzgâr hızlarında rotor hızı değiştirilerek
maksimum güç noktaları yakalanabilmektedir. Yüksek rüzgâr hızlarında ise gücü sınırlamak
türbin güvenliği açısından zaten gereklidir.
Frekans konvertörleri vasıtası ile şebeke frekansı yakalanabildiğinden ilave bir dişli kutusuna
ihtiyaç duymazlar. Bu nedenle günümüzde bir çok makina dişli kutusu barındırmazlar. Ancak
bu türbinler için üretilen senkron makinalar yüksek sayıda kutuplu yapılırlar (kutup sayısı
genelde 80 ve üzeridir.) Bu makinaların belli başlı avantajları:
Daha az malzeme ihtiyacı
Daha düşük maliyet
Daha az gürültü
PWM inverterlerin kullanılması ile reaktif güç kontrolü de yapılabilmektedir.
RÜZGAR TÜRBİNLERİNDE TEMEL GÜÇ KONTROL PARAMETRELERİ
Bir rüzgar türbin modeline ilişkin sürekli hal mekanik güç karakteristiği;
Pm
1
. A.v 3 .
2
2
vo vo
1 1
v v
2
1
. A.v 3 .c p
2
olarak elde elde edimiş idi. Burada cp parametresi KHO’nun bir fonksiyonudur. KHO
parametresi ise kanat açısı (αk) ayar edilerek kontrol edilir. Yani hem KHO’nun, hem de
αk’nın bir fonksiyonudur.
(
)
Aşağıda, örnek bir cp fonksiyonu görülmektedir. Verilen grafik ise farklı kanat açıları için cp’
nin KHO ile değişimini göstermektedir.
[
]
[
]
0,5
Alfa (0 derece)
Alfa (5 derece)
Alfa (15 derece)
Alfa (20 derece)
Alfa (10 derece)
0,4
Cp
0,3
0,2
0,1
0
0
5
KHO
10
15
Dolayısı ile burada generatör hızı (ωr), kanat açısı ve rüzgar hızı parametreleri kontrol
sisteminin giriş büyüklükleri olarak kullanılırlar. Çıkış büyüklüğü ise generatör miline
uygulanan moment olarak hesaplanır.
SİNCAP KAFES ASENKRON GENERATÖRLÜ RÜZGÂR TÜRBİNİ (SABİT HIZLI)
Aşağıda değişken kanat açılı bir rüzgar türbini tarafından sürülen sincap kafesli asenkron
generatörüne ilişkin kanat açısı kontrol sisteminin prensip şeması görülmektedir. Kanat açısı
kontrol edilerek elektriksel çıkış gücü, nominal mekanik güce eşitlenir. Eğer elektriksel güç,
mekanik güç nominal değerini aşarsa kanat açı değeri yükseltilerek çıkış güç tekrar nominal
değere eşitlenir.
KANAT AÇISI
KONTROLÜ
Pes
-
Ptürbin
Pr
DİŞLİ
KUTUSU
RÜZGAR
Kanat Açısı Kontrolü
Kanat Açısı
(0o ile maksimum
kanat açısı arasında)
Pmekanik (nom)
Pelektrik
+
Es
Burada rotoru rüzgar türbini tarafından sürülen asenkron generatörün stator sargıları
doğrudan 3 fazlı şebekeye bağlıdır. Rüzgar türbini tarafından yakalanan mekanik güç,
asenkron generatör tarafından elektrik enerjisine dönüştürülür ve stator sargıları üzerinden
şebekeye aktarılır. Kanat açısı düşük rüzgar hızlarında maksimum gücü verecek şekilde,
yüksek rüzgar hızlarında ise nominal gücü verecek şekilde kontrol edilir. Burada güç
üretebilmek için asenkron generatör hızı, senkron hızın biraz üzerinde olmalıdır. Burada
hızdaki dalgalanmalar oldukça düşük tutulduğundan, bu tür rüzgar türbinleri sabit hızlı rüzgar
türbinleri olarak adlandırılır. Asenkron generatörün ihtiyacı olan reaktif güç ya şebeke
tarafından veya kondansatör gurubu, SVC, STATCOM ve seknron kompanzatör (senkron
kondenser=Boşta çalışan senkron motor gibi, gerilim regülatörü ile uyarması kontrol edilerek
bazen kapasitif, bazen de endüktif güç çekmesi sağlanır. Böylece istenilen güç faktörü
ayarlanmış olur) gibi düzenekler vasıtası ile karşılanır.
Sabit hızlı rüzgar türbinlerinde, generatör şebeke ortak bağlantı noktasına doğrudan bağlanır.
Burada şebeke frekansı generatörün dönüş hızını belirler. Generatör hızı kutup çifti sayısına
ve şebeke frekansına bağlıdır. Sincap kafesli asenkron generatör kullanan rüzgar türbinlerinin
hızları en fazla %1-2 civarında değişim gösterir. Burada güç aerodinamik yapı sayesinde
kontrol edilebilmektedir. Burada üç çeşit kontrol vardır: i.) Kanat açı kontrolü (pitch control),
ii.) pasif durdurma kontrolü (kanatlar rotor göbeğine sabit açı ile sabitlenmiştir. Burada
tasarım rüzgarın çok hızlanması durumunda kanatlarda türbülans oluşturarak kanatların
yavaşlaması sağlanır. Burada kanat büklümlü yapıdadır.) , ii.) aktif durdurma kontrolü (kanat
açı kontrollü yapıya oldukça benzer. Düşük rüzgar hızlarında kanat açıları maksimum
momenti sağlayacak şekilde ayarlanır. Makine nominal güce ulaştıktan sonra yüksek rüzgar
hızlarında aşırı yüke maruz kalıyor ise kanat açıları – kanat açı kontrollü türbinlerin aksine –
tam ters yöne getirilir. Böylece makine neredeyse bütün yüksek hızlarda maksimum güç
değerinde çalıştırılabilir. Pasif durdurmanın aksine burada daha hassas güç kontrolü
yapılabilmekte ve daha geniş aralıklarda optimum güce ulaşılabilmektedir.)
ÇİFT BESLEMELİ ASENKRON GENERATÖRLÜ RÜZGÂR TÜRBİNİ (DEĞİŞKEN HIZLI)
Çift beslemeli asenkron generatörlü rüzgar türbin sisteminin prensip şeması aşağıdaki şekilde
gösterilmiştir. AC/DC/AC konverter sistemi şebeke tarafı ve rotor tarafı olmak üzere ikiye
ayrılır. Her iki konverter de gerilim beslemeli konvereter olup, AC ile DC gerilimleri
birbirlerine bağlar. Her iki konverter arasındaki kondansatör bir DC gerilim kaynağı gibi
davranır. Şebeke ile bağlantıyı sağlamak üzere ise bir endüktans elemanı kullanılmıştır. 3 fazlı
rotor sargıları rotor tarafı konverterine bilezik ve fırçalar üzerinden bağlı iken, stator sargıları
ise doğrudan şebekeye bağlıdır.
Rüzgar türbini tarafından yakalanan güç, asenkron generatör tarafından elektriksel güce
çevrilirken, bu güç hem rotor hem de stator sargıları üzerinden şebekeye aktarılır. Burada
kontrol sistemi kanat açısı ve gerilim kumanda sinyallerini (Vr ve Vş) üretir ve böylece
türbinin çıkış gücü, DC bara gerilimini, şebeke tarafındaki AC gerilimi ve reaktif güç miktarı
ayarlanır.
Es
fs
Pes
KONTROL
AC
Vs
(-)
(+)
Ed
DC
Vr
fr
AC
s.Pr
Ptürbin
Pr
DİŞLİ
KUTUSU
RÜZGAR
KANAT AÇISI
Şek
Şekil. Çift beslemeli asenkron generatörlü rüzgar türbin sisteminin çalışma prensip şeması
RÜZGÂR TÜRBİN EKONİMİSİ
KURULUŞ MALİYETİ VE YILLIK MALİYET
Yeni rüzgâr türbinleri daha büyük nominal güçlerde üretebilmesine rağmen, kW başına
kuruluş maliyeti düşmektedir. Örneğin 1989 yılında 150 kW’lık bir türbinin birim maliyeti
1500 $/kW iken, 2000 yılında 1650 kW’lik bir makinenin birim maliyeti 800 $/kW’a kadar
gerilemiştir.
150 kW
Kuruluş Maliyeti ($/kWh)
225 kW
300 kW
500 kW
600 kW
1650 kW
Yıllar
Büyük makine için gerekli işçilik maliyeti, küçük makineye göre çok fazla değildir. Güç
elektroniği ünitesindeki maliyet farkı oldukça düşüktür. Rotor maliyeti yaklaşık çapı ile doğru
orantılıdır. Daha uygun kuleler ile yakalanacak enerji ilave maliyet girdisinden daha fazladır.
Kuruluş maliyeti parametreleri
Yıllık maliyet parametreleri
-Türbin maliyeti
-Bölge çalışmaları ve şebeke bağlantısı
-Yapım esnasındaki faiz
-Proje geliştirme ve fizibilite çalışmaları
-Mühendislik
-Parça ve işçilik
-Sigorta
-Risk/arıza maliyeti
-Arazi kiralama
-Mülkiyet vergisi
-İletim hattı bakımı
-Genel muhtelif giderler
+
+
Toplam Kuruluş Maliyeti
Toplam Yıllık Maliyet
RÜZGÂR TÜRBİNİ İÇİN YILLIK ELEKTRİK MALİYETİ
Aynı seviyeye getirilmiş enerji maliyetini hesaplayabilmek için, yıllık maliyet, yıllık enerji
miktarına bölünür. Yıllık maliyeti bulmak için aşağıdaki basit prosedür kullanılabilir.
Bir rüzgâr enerji sisteminin borçlanma ile finans edildiğini düşünelim. Kuruluş maliyetini
sistem ömrü boyunca dağıtırsak kuruluş maliyeti yıllık baza dönüştürülmüş olur. Kuruluş
maliyeti yıllara eşit bölüştürmek için “Kapital Geri dönüşüm Formülü” (CRF=Capital recovery
factor) kullanılabilir. Daha sonra bu değere yıllık bakım onarım maliyeti eklenir.
Alınan krediyi yıllık ödeme miktarı A ile gösterilirse,
[
Burada;
(
)
(
(
)
)
(
(
)
)
]
(
)
i →Faiz Oranı
n →Kredi periyodu
A→Yıllık ödeme miktarı ($/yıl)
P →Ana borç ($)
ÖRNEK: 0,9 kW/2.13 m ‘lik bir rüzgâr türbini maliyeti 1600 $’dır. Sistemin devreye alınmasına
kadar geçen sürede maliyet 2500$’a çıkmış olup geri ödeme süresi %7 faizle 15 yıldır. Bakım
onarım maliyeti 100$ ise birim enerji maliyetini ($/kwh) 15 yıl boyunca hesaplayınız. (not:
rotor göbeği hizasındaki ortalama rüzgâr hızı 6,7 m/s’dir)
ÇÖZÜM:
ÖRNEK: Bir rüzgâr çiftliği projesi kapsamında 40 adet rotor çapı 60 m olan 1500 kW’lık türbin
kurulması hedeflenmektedir. Kuruluş maliyeti 60 milyon $ dır. Ve aynı düzeye getirilmiş
bakım onarım maliyeti 1.8 milyon $/yıldır. Proje için %7 faizden 20 yıllığına 45 milyon $ kredi
kullanılmıştır. Öz sermaye 15 milyon $ ve % 15lik geri dönüşüme ihtiyaç duyulmaktadır.
Türbin ortalaması 8m/s olan Rayleigh rüzgârına maruz kalıyor ise, projeyi uygulanabilir hale
getirebilmek için aynı düzeye getirilmiş elektrik enerji maliyeti kaç olmalıdır.
ÇÖZÜM: