FÄ°Z217 bolum1 10 ekim
advertisement

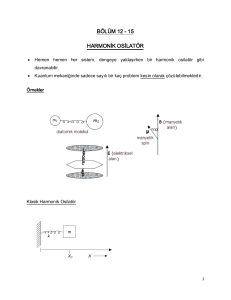
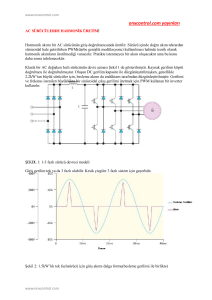
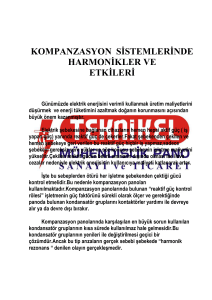
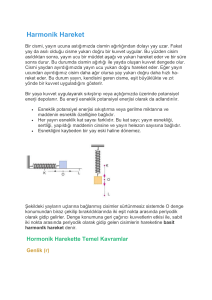
TİTREŞİM VE DALGALAR Periyodik Hareketler: Belirli aralıklarla tekrarlanan harekete periyodik hareket denir. Sabit bir nokta etrafında periyodik hareket yapan cismin hareketine titreşim hareketi denir. Genellikle sinüs veya cosinüs fonksiyonları olarak ifade edilen periyodik hareketlere harmonik hareket denir. Parçacığı denge konumuna geri getirmeye çalışan kuvvet, uzanımla orantılı ise bu titreşim hareketine basit harmonik hareket (BHH) denir. Basit harmonik harekette uzanımın zamanla değişimi basit bir sinüs eğrisidir. Bu nedenle basit harmonik harekete sinüzoidal hareket denir. Titreşim bir denge noktası etrafındaki mekanik salınımdır. Bu salınımlar bir sarkaçın hareketi gibi periyodik olabileceği gibi çakıllı bir yolda tekerleğin hareketi gibi rastgele de olabilir. Titreşim hareketi zamana bağlı y(t) gibi bir fonksiyonla ifade edilebilir. Dalga: Dalga hareketinin oluşumunun ana kaynağı titreşimdir. Ancak her titreşim dalga hareketi oluşturmayabilir. Dalga titreşimin bir yerden başka bir yere taşınmasıdır. Bu harekette hem zaman ilerler hem de konum değişir. Bu nedenle dalga hareketi hem konuma hem de zamana bağlıdır ve y(x,t) gibi bir fonksiyonla ifade edilebilir. BÖLÜM 1 1.1. PERİYODİK HAREKET Bütün titreşen cisimler aynı hareketi defalarca yaparlar. Böyle harekete periyodik hareket denir. Uzamayan fakat kolayca bükülebilen ve kütlesi ihmal edilebilen bir ipin ucuna asılmış bir kürecikten oluşan düzeneğe basit sarkaç denir. Şekil 1.1'deki basit sarkaç bir yönde çekilip bakılırsa, ileri ve geri hareket yaparak titreşir. Şekil 1.1 Periyodik hareket yapan bir sarkaç Titreşimin periyodu, hareketin bir tam salınımı için geçen zamandır. Şekil 1.1'deki sarkacın periyodu, A’dan C ’ye ve tekrar A 'ya dönmesi için geçen süredir. Bir periyotluk harekete titreşimin devri denir. Titreşimin frekansı, birim zamanda sistem tarafından tamamlanan titreşim devirlerinin sayısıdır. Çoğunlukla frekans, saniyedeki devir sayısı (s-1) olarak ifade edilir. Frekansın birimi, SI sisteminde hertz (Hz) 'dir. Bu birim, saniyedeki devir sayısının diğer bir adıdır (1 Hz = s-1). Periyot T, frekans f ile gösterilirse, aralarında 𝑓. 𝑇 = 1 bağıntısı vardır. Bu bağıntı bütün periyodik hareketlere uygulanır. 1 Örnek 1.1 Bir harekette frekans 10 Hz 'dir. Bu hareketin periyodu nedir? Çözüm : 𝑓𝑇 = 1 ⇒ 𝑇 = 1/𝑓 = 1/10 = 0,1 𝑠 Uzanım: Parçacığın titreşim hareketi yaparken herhangi bir t anında denge durumuna ulan uzaklığıdır. Genlik: Parçacığın titreşim hareketi yaparken denge durumundan itibaren en büyük yer değiştirmesine genlik denir. Uzanımın maksimum değeri genliktir. Şekil 1.1'deki sarkaç için genlik AB veya BC uzaklığıdır. 1.2. BASİT HARMONİK HAREKET (BHH) Bir denge durumu etrafında salınım hareketi yapan ve denge durumuna uzaklığı ile zıt yönde bir geri çağırıcı kuvvetle orantılı olan maddesel bir noktanın hareketine basit harmonik hareket denir. Kuvvet sabiti k olan bir yaya bağlı, sürtünmesiz yatay bir düzlemde serbestçe hareket eden ve kütlesi m olan bir cisim, bir basit harmonik harekete örnek oluşturur (şekil 1.2). Bu tanıma göre, yay-blok sistemi için geri çağırıcı kuvvet, F = −kx olarak yazılır. x: denge durumuna uzaklık (uzanım), k: bir orantı katsayısıdır. Şekil 1.2 Kütlesi m olan bir cismin basit harmonik hareketi 2 Yay denge konumunda ise (şekil 1.2.b. ve d.) cisim üzerine bir kuvvet uygulanmaz. Eğer cisim sağa doğru yer değiştirmiş ise (şekil 1.2 a.), yayın cisme uyguladığı kuvvet sola doğru yönelmiştir. Cisim sola doğru yer değiştirmiş ise, kuvvet sağa doğru yönelmiştir. Kuvvet her iki durumda da F = - k.x ile verilir. Burada kuvvet, her durumda parçacığı geri getirecek yönde etkimektedir. Onun için bu kuvvete geri çağırıcı kuvvet denir. Yukarıda gösterilen hareket basit harmonik hareket olup, Şekil 1.2’de bir tam devir gösterilmiştir. Düzgün dairesel hareket yapan bir taneciğin yörünge düzleminin bir doğrusu üzerindeki izdüşümünün hareketi de basit harmonik harekettir (Şekil1.3). Şekil 1.3 Düzgün dairesel hareket yapan bir taneciğin yörünge düzleminin bir doğrusu üzerindeki izdüşümünün hareketi basit harmonik harekettir. Düzgün dairesel hareket yapan bir P noktasının herhangi bir anda x-ekseni üzerindeki izdüşüm noktasının denge noktasına uzaklığı, 𝑥 = 𝐴𝑠𝑖𝑛𝜃 dır. θ = wt olduğundan, 𝑥 = 𝐴𝑠𝑖𝑛𝑤𝑡 𝑑𝑥 olur. Hız, 𝑣= ivme, 𝑎 = −𝑤 2 𝐴𝑠𝑖𝑛𝑤𝑡 = −𝑤 2 𝑥 𝑑𝑡 = 𝑤𝐴𝑐𝑜𝑠𝑤𝑡 dir. İvme, 𝑎 = −𝑤 2 𝑥 bağıntısında w sabit bir değere sahiptir. Basit harmonik hareket yapan bir cisimde, 𝑎 = −𝑤 2 𝑥 = − 𝑘 𝑥 𝑚 𝑘 dir. Burada k, kuvvet sabitidir, w açısal hızı ifade eder ve 𝑤 = √𝑚 olarak tanımlanır. A’ noktasının basit harmonik hareketinin periyodu, 𝑇 = 2𝜋 𝑤 𝑚 = 2𝜋√ 𝑘 olarak bulunur. Bir katının kristal yapısını oluşturan atomlar da denge konumları etrafında gidiş-geliş hareketi (BHH) yaparlar. 3 Dönme Vektörü ile Basit Harmonik Hareketin (BHH) Tanımlanması: Basit haronik hareketi (BHH) tanımlamanın en kullanışlı yollarından biri de bu harekete düzgün dairesel hareketin x (veya y) eksenleri üzerinde izdüşümü olarak bakmakla elde edilir. ⃗⃗⃗⃗⃗ vektörünün O noktası etrafında w açısal hızı ile Büyüklüğü r olan 𝑂𝑃 A döndüğünü varsayalım (şekil 1.4). Şekildeki P noktasının +x ekseni ile yaptığı açıyı 𝜃 = 𝑤𝑡 olarak açısal hıza bağlı yazabiliriz. P noktasının x-ekseni ve y-ekseni üzerindeki izdüşümü için, sırasıyla 𝑥 = 𝐴 𝑐𝑜𝑠𝑤𝑡 𝑦 = 𝐴 𝑠𝑖𝑛𝑤𝑡 (1.1) (1.2) İfadelerini yazabiliriz. Hareket –A ile +A arasında, x-ekseninde (1.1) ve y-ekseninde (1.2) ifadesi ile verilen basit harmonik hareket yapar. A niceliğine hareketin genliği denir. Düzgün Dairesel Hareketin Polar Koordinatlarda Analizi: ⃗⃗⃗⃗⃗ 𝑂𝑃 vektörü orijinden parçacığın bulunduğu noktaya giden yer vektörü ve bu vektörün boyunu 𝑟 ve x-ekseninin pozitif tarafı ile yaptığı açıyı olarak seçelim. Bu durumda P noktasının yerini 𝑃(𝑟, ) polar koordinatlarıyla belirleyebiliriz. Dik koordinatlar ile polar koordinatlar arasındaki ilişkinin Şekil 1.5. 𝑥 = 𝑟 cos 𝜃 ve 𝑦 = 𝑟 𝑠𝑖𝑛𝜃 (1.3) olduğunu biliyoruz. ⃗⃗⃗⃗⃗ 𝑂𝑃 vektörünü ⃗⃗⃗⃗⃗ 𝑂𝑃 = 𝑥𝑖̂ + 𝑦𝑗̂ = 𝑟𝑐𝑜𝑠𝜃𝑖̂ + 𝑟𝑠𝑖𝑛𝜃𝑗̂ (1.4) yazabiliriz. Şimdi bu ifadeyi başka bir şekilde ifade etmeye çalışalım. 𝑟 = 𝑥 + 𝑖𝑦 (1.5) Denklem (1.5)’in aşağıda söylenenleri temsil ettiği varsayılmıştır: 1. x gibi bir yer değiştirme herhangi bir sınırlayıcı faktör olmaksızın x-eksenine paralel yapılmalıdır. 2. iy teriminin y-eksenine paralel bir yönde y yer değiştirmesi yaptırması gerektiği anlaşılmalıdır. Bu eşitlik aslında 𝑧 = 𝑎 + 𝑖𝑏 şeklinde yazılan kompleks niceliğine denktir. 4 Kompleks Sayılar: Eğer a ve b nicelikleri reel sayılar ise 𝑧 = 𝑎 + 𝑖𝑏 (1.8) toplamı KOMPLEX bir sayı olacaktır. Çağdaş mühendislik alanında yer alan titreşim hareketleri, harmonik salınımlar, sönümlü titreşimler, değişken akımlar ve dalga olaylarının incelenmesinde uygun bir matematik dilidir. a) ib niceliğini oluşturmak için, Şekil 1.6’da görüldüğü gibi, x-ekseni boyunca b kadarlık bir mesafe ilerlenir ve sonra y-ekseni boyunca b uzunluğunda bir yer değiştirme olması için 90° döndürülür. b) i2b niceliğini oluşturmak için, önce a-şıkkında olduğu gibi ib oluşturulur ve ona 90°’lik bir dönme uygulanır. Çünkü i2b = i (ib) şeklinde yazılabilir. Arka arkaya 90°’lik iki dönme pozitif x-ekseni boyunca b yer değiştirmesini, negatif x-ekseni boyunca –b yer değiştirmesine döndürmektedir. Buradan cebirsel bir eşitlik elde ederiz: √−1 = 𝑖, i2 = -1 Şekil 1.6. c) 𝑧 = 𝑎 + 𝑖𝑏 olarak tanımlanıyorsa, iz nedir? 𝑧 = 𝑎 + 𝑖𝑏 (1.6) 𝑖𝑧 = 𝑖𝑎 + 𝑖 2 𝑏 = 𝑖𝑎 + (−𝑏) (1.7) iz vektörünün bileşenleri Şekil-1.7b’de gösterilmiştir. Bileşke vektör iz, z vektörüne 90°’lik bir ilave dönme ile meydana getirilmiştir. Şekil 1.7 (a) Şekil 1.7 (b) Bu çeşit bir analiz cebir ile geometri arasında uygun bir köprü kurar. Eğer a ve b nicelikleri reel sayılar ise 𝑧 = 𝑎 + 𝑖𝑏 (1.8) 5 toplamı KOMPLEX bir sayı olacaktır. Geometrik olarak Şekil 1.7a’dan da açıkça görülebileceği gibi tan = b/a olacak şekilde x-ekseninden itibaren belli bir açısı yapan eksen boyunca bir yer değiştirme söz konusudur. Bir kompleks sayı ile bir vektörü bu şekilde temsil ederek BHH’i analiz etmek için fiziksel olarak uygun bir yönteme sahip olmuş olduk. Bu yöntemle bir titreşim hareketi problemini çözdükten sonra, a ve b değerleri reel olan, 𝑧 = 𝑎 + 𝑖𝑏 şeklinde bir sonuç elde edilir. a istenen nicelik olup b ise ihmal edilebilir. KOMPLEX ÜSTEL FONKSİYON VE BU FONKSİYON İLE BASİT HARMONİK HAREKETİN TANIMLANMASI Kompleks üstel fonksiyonu tanımlamak ve ele almak titreşim problemlerini kolaylaştırması bakımından önemlidir. Titreşimlerin analizinde, periyodik yer değiştirme ve bu yer değiştirmenin zamana göre birinci türevi olan hız ve ikinci türevi olan ivme ile ilgileneceğiz. Hareketi tanımlayan yer değiştirme, hız ve ivme ifadeleri sinüs ve cosinüs’lü terimleri içerir. Bunun için Taylor teoremi1 kullanılarak sinüs ve kosinüs fonksiyonlarının seriye açılımları yapılırsa 𝑠𝑖𝑛𝜃 = 𝜃 − 𝑐𝑜𝑠𝜃 = 1 − 𝜃3 3! 𝜃2 2! + + 𝜃5 5! 𝜃4 4! ⋯ (1.9) ⋯ (1.10) ifadeleri elde edilir. Şimdi aşağıdaki toplamı yaparsak 𝑐𝑜𝑠𝜃 + 𝑖𝑠𝑖𝑛𝜃 = 1 + 𝑖𝜃 − -1 yerine i2 yazıp yeniden düzenlenirse, 𝑐𝑜𝑠𝜃 + 𝑖𝑠𝑖𝑛𝜃 = 1 + 𝑖𝜃 + (𝑖𝜃)2 2! + (𝑖𝜃)3 3! 𝜃2 2! + −𝑖 (𝑖𝜃)4 4! 𝜃3 3! + + 𝜃4 4! (𝑖𝜃)5 5! +𝑖 𝜃5 5! ⋯ + ⋯+ (1.11) (𝑖𝜃)𝑛 𝑛! (1.12) ifadesi elde edilir. Bu eşitliğin sağ tarafı 𝑒 𝑖𝜃 ’nın seri açılımıdır. Bu durumda eşitlik 𝑐𝑜𝑠𝜃 + 𝑖𝑠𝑖𝑛𝜃 = 𝑒 𝑖𝜃 (1.13) olarak yazılabilir. (EULER eşitliği: Leonhard EULER tarafından 1748’de elde edilmiştir.) Genellikle 𝑒 𝑖𝜃 ile bir z kompleks sayısının çarpımı, z’nin uzunluğunu değiştirmeden açısı kadar dönmesini tanımlar. 1 𝑓(𝑥) = 𝑓(0) + 𝑥𝑓 ′ (0) + 𝑥2 2! 𝑓′′0) + ⋯ 6 Örneğin BHH için, 𝑥 = 𝐴𝑐𝑜𝑠(𝑤𝑡 + 𝛼) ve y= 𝐴𝑠𝑖𝑛(𝑤𝑡 + 𝛼) 𝑑𝑥 𝑣= = −𝑤𝑠𝑖𝑛(𝑤𝑡 + 𝛼) 𝑑𝑡 𝑑𝑣 𝑑2 𝑥 𝑎= = = −𝑤 2 𝑐𝑜𝑠(𝑤𝑡 + 𝛼) = −𝑤 2 𝑥 𝑑𝑡 𝑑𝑡 2 şeklindedir. Diğer taraftan, x ve y’nin x+iy şeklindeki bir toplamı ile ilgileniyorsak aşağıdaki ifadeyi yazabiliriz. 𝑧 = 𝐴𝑐𝑜𝑠(𝑤𝑡 + 𝛼) + 𝑖𝐴𝑠𝑖𝑛(𝑤𝑡 + 𝛼) = 𝐴𝑒 𝑖(𝑤𝑡+𝛼) Bu ifadede x, z’nin reel kısmını göstermektedir. Hız ve ivmeye karşılık elde edilecek vektörler, 𝑑𝑧 = 𝑖𝑤𝐴𝑒 𝑖(𝑤𝑡+𝛼) = 𝑖𝑤𝑧 𝑑𝑡 𝑑2𝑧 = (𝑖𝑤)2 𝐴𝑒 𝑖(𝑤𝑡+𝛼) = −𝑤 2 𝑧 𝑑𝑡 2 olur. Bu üç vektör Şekil 1.8’de gösterilmiştir. Üç vektör arasındaki faz ilişkisinde görüldüğü gibi, her bir i değeri faz açısında /2 kadarlık bir artışa karşılık gelir. 𝐴 𝑤𝑡 + 𝛼 Şekil 1.8. Vektörlerin reel eksen üzerindeki izdüşümleri. a) z yer değiştirme vektörü b) Hız vektörü c) İvme vektörü a) 𝑥 𝑥 𝐴𝑤 𝑤𝑡 + 𝛼 + 𝜋⁄2 𝑣 b) 𝑑𝑥⁄𝑑𝑡 𝑑2 𝑥 ⁄𝑑𝑡 2 𝑤𝑡 + 𝛼 + 𝜋 c) 𝑎 𝐴𝑤 2 7