FÄ°Z217 bolum3 14 ekim
advertisement

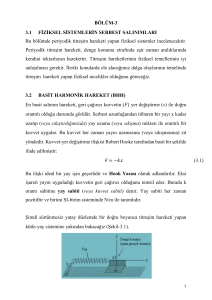
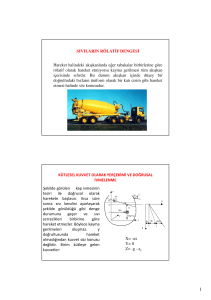
Leyla Yıldırım Bölüm 3 10.10.12 BÖLÜM 3 FİZİKSEL SİSTEMLERİN SERBEST SALINIMLARI BASİT HARMONİK HAREKET (BHH) Cisimlerin elastik özellikleri ile ilgili olarak kuvvet-yer değiştirme ilişkisi Robert Hooke tarafından basit bir şekilde ifade edilmiştir. Örneğin yay-cisim sistemi için, denge konumundan x kadar sıkıştırılarak veya gerilerek uzaklaştırılmış yay, ucuna tutturulmuş cisme, Hook yasasına göre, F = kx ile verilen geri çağırıcı bir kuvvet uygular. Bu örnekte olduğu gibi, yer değiştirme ile orantılı bir geri çağırıcı kuvvetin etkisindeki cisimler BHH yaparlar. 3.1. Kütle-Yay Sistemi Yay sabiti k olan bir yayın ucuna m kütleli bir cisim bağlanarak, denge noktası etrafında 𝑭 = 𝑘𝒙 şeklinde bir geri çağırıcı kuvvetin etkisi ile BHH yapmaktadır. 3.1.1. Yatayda Kütle-Yay sistemi Böyle bir sistemde kinetik enerjiyi m kütleli cisim taşırken, potansiyel enerji yayda depolanacaktır. 𝑭 = 𝑘𝒙 Bu ifadedeki () işareti geri çağırıcı kuvvet olduğunu, 𝐹’nin yönünün 𝑥’in değişim yönü ile ters olduğunu göstermeketdir. 𝑚 𝑑2𝑥 = −𝑘𝑥 𝑑𝑡 2 𝑚 𝑑2𝑥 + 𝑘𝑥 = 0 𝑑𝑡 2 𝑤 2 = 𝑘/𝑚 𝑑2𝑥 + 𝑤 2𝑥 = 0 𝑑𝑡 2 Bu denklemin çözümü: 𝑥 = 𝐴𝑐𝑜𝑠(𝑤𝑡 + 𝜑) 𝑥: uzanım 𝐴: genlik 𝑤: açısal frekans (𝑤 = 2𝑓 = 2/𝑇) (𝑓:frakans, 𝑇: periyot, 𝑇 = 2𝜋√𝑚/𝑘 ) 𝜑: faz sabiti 1 Leyla Yıldırım Bölüm 3 10.10.12 3.1.2. Düşeyde Kütle-Yay sistemi 𝑚𝑔 = 𝑘. ∆𝑙 𝐹 = −𝑘(𝑥 + ∆𝑙) + 𝑚𝑔 = −𝑘𝑥 −∆𝑙. ⏟ 𝑘 + 𝑚𝑔 = −𝑘𝑥 0 𝑚 𝑑2𝑥 + 𝑘𝑥 = 0 𝑑𝑡 2 𝑤 2 = 𝑘/𝑚 𝑑2𝑥 + 𝑤 2𝑥 = 0 𝑑𝑡 2 Şekil 3.2 𝑥 = 𝐴𝑐𝑜𝑠(𝑤𝑡 + 𝜑) Şekil 3.3. Düşeyde hareket yapan kütle-yay sistemi ve BHH hareketi yapan bir cismin x, v, a grafikleri. Paralel Bağlı Yaylar Paralel bağlı yaylardaki uzama miktarı birbirine eşittir. Yayların kütleye uyguladığı toplam kuvvet her iki yayın uyguladığı kuvvetlerin toplamına eşittir. 𝐹𝑛𝑒𝑡 = 𝐹1 + 𝐹2 𝑘𝒙 = 𝑘1 𝒙 + 𝑘2 𝒙 Yaylar paralel bağlandığında toplam yay sabiti, yayların yay sabitlerinin toplamına eşittir. 𝒌 = 𝒌𝟏 + 𝒌𝟐 Seri Bağlı Yaylar Yayları uç uca eklediğimizde seri bağlamış oluruz. Seri bağlı yaylarda herbir yay üzerine ortaya çıkacak kuvvet eşittir. 𝐹𝑛𝑒𝑡 = 𝐹1 = 𝐹2 Yaylar seri bağlandığında, toplam uzama her iki yaydaki uzamanın toplamına eşittir. 𝑥 = 𝑥1 + 𝑥2 𝐹 𝑘 = 𝐹 𝑘1 + 𝐹 𝑘2 𝟏 𝒌 = 𝟏 𝒌𝟏 + 𝟏 𝒌𝟐 2 Leyla Yıldırım Bölüm 3 10.10.12 3.1.3. Basit Harmonik Harekette Enerji BHH yapan bir kütle yay sisteminin toplam mekanik enerjisi 1 1 𝐸 = 𝐾 + 𝑈 = 𝑚𝑣 2 + 𝑘𝑥 2 2 2 ifadesi ile verilir. BHH yapan bir cismin herhangi bir andaki uzanım değeri 𝑥(𝑡) = 𝐴𝑠𝑖𝑛𝑤𝑡 ve hızı, 𝑣(𝑡) = 𝐴 𝑤 cos 𝑤𝑡 𝑥 1 = 𝑐𝑜𝑠 2 𝑤𝑡 + 𝑠𝑖𝑛2 𝑤𝑡 ve sin 𝑤𝑡 = 𝐴 dir. 𝑥 2 olduğundan herhangi bir t anındaki hız, 𝑣 = ∓𝐴𝑤 √1 − (𝐴) = ∓𝑤√𝐴2 − 𝑥 2 olur. Cisim denge durumundan geçerken (𝑥 = 0) en büyük hıza, dolayısıyla en büyük kinetik enerjiye sahip olur. Cisim dönme noktalarında geçerken (𝑥𝑚𝑎𝑥 = 𝐴) ise en büyük potansiyel enerjiye sahip olur. Kinetik enerjinin maksimum değeri potansiyel enerjinin maksimum değerine eşittir ve bu değer herhangi bir andaki toplam enerjiye eşittir. Cisim denge durumundan geçerken 𝑥 = 0 olacağından, 𝑣𝑚𝑎𝑥 = 𝐴𝑤 elde edilir. Bu cismin hareketteki en büyük hızıdır. Bu durumda kinetik enerji de en büyük olacağından, 1 1 2 𝐾𝑚𝑎𝑥 = 𝑚𝑣𝑚𝑎𝑥 = 𝑚𝐴2 𝑤 2 2 2 𝑘 dir. 𝑤 2 = 𝑚 değeri yukarıdaki bağıntıda yerine konursa, 𝐾𝑚𝑎𝑥 = 2𝜋 2 𝑚𝑓 2 𝐴2 1 2 1 1 𝑈𝑚𝑎𝑥 = 𝑘𝑥𝑚𝑎𝑥 = 𝑘𝐴2 = 𝑤 2 𝑚𝐴2 = 𝐾𝑚𝑎𝑥 = 2𝜋 2 𝑚𝑓 2 𝐴2 2 2 2 sonucuna varılır. Cismin herhangi bir andaki kinetik ve potansiyel toplamı, kinetik zamanda enerjilerinin maksimum enerjiye aynı maksimum potansiyel enerjiye eşit olacaktır. 3 Leyla Yıldırım Bölüm 3 10.10.12 𝒙 = 𝑨𝒔𝒊𝒏𝒘𝒕 𝟏 𝟏 𝟏 𝟏 𝟏 𝟏 K = 𝟐 𝒎𝒗𝟐 = 𝟐 𝒎𝑨𝟐 𝒘𝟐 𝒄𝒐𝒔𝟐 𝒘𝒕 U = 𝟐 𝒌𝒙𝟐 = 𝟐 𝒌𝑨𝟐 𝒘𝟐 𝒔𝒊𝒏𝟐 𝒘𝒕 E = 𝟐 𝒌𝑨𝟐 = 𝟐 𝒎𝒘𝟐 𝑨𝟐 Şekil 3.4. BHH yapan bir cismin uzanım, kinetik enerji (k.e.), potansiyel enerji (p.e.) ve toplam enerjinin (E) zamanla ve yer değiştirmeye göre değişim grafiği. 3.2.1. Basit Sarkaç Bir ucundan tespit edilmiş ℓ uzunluğundaki hafif iplikle taşınan m kütleli noktasal bir cismin oluşturduğu düzeneğe basit sarkaç denir. Basit sarkaç denge konumundan küçük bir θ açısı kadar uzaklaştırılıp serbest bırakılırsa mg yerçekimi kuvvetiyle ipteki T gerilmesinin etkisi altında düşey bir düzlemde periyodik salınımlar yapılır. Kütleye etki eden geri çağırıcı kuvvet 𝐹 = −𝑚𝑔𝑠𝑖𝑛𝜃 ifadesi ile verilir. 𝜃 açısının küçük (5°den küçük) olması halinde, 𝑆𝑖𝑛𝜃 ≈ 𝜃 olup, 𝜃 = 𝑠/ℓ’dir. Bu durumda geri çağırıcı kuvvet, 𝐹 = −𝑚𝑔𝜃 = −𝑚𝑔 𝑠⁄𝑙 olur. Şu halde küçük 𝜃 uzanımları için geri getirici kuvvet uzanımla orantılıdır. Dolayısıyla bu şart altında basit sarkacın hareketi basit harmonik hareket’tir. θ açısının küçük değerleri için sinθ = θ − θ3 θ5 θ7 + − +⋯≅θ 3! 5! 7! 𝐹 = −𝑚𝑔𝑠𝑖𝑛𝜃 ≅ −𝑚𝑔𝜃 4 Leyla Yıldırım Bölüm 3 𝐹 = 𝑚𝑎 = 𝑚 𝑚𝑙 10.10.12 𝑑2𝑠 𝑑2 𝑑2𝜃 (𝑙𝜃) = 𝑚 = 𝑚𝑙 𝑑𝑡 2 𝑑𝑡 2 𝑑𝑡 2 𝑑2 𝜃 = −𝑚𝑔𝜃 𝑑𝑡 2 𝑑2𝜃 𝑑𝑡 2 𝑔 + 𝜃=0 𝑙 𝑤2 = 𝑔 𝑙 𝑑2𝜃 𝑑𝑡 2 + 𝑤 2 𝜃 = 0 (BHH) Bu denklemin çözümü: 𝜃 = 𝜃0 cos(𝑤𝑡 + ∅) : Açısal uzanım 𝜃0 : Açısal genlik 1 𝑤 = √𝑔/𝑙 , 𝑓 = √𝑔/𝑙 𝑣𝑒 𝑇 = 2𝜋√𝑙/𝑔 2𝜋 Periyot (veya frekans) kütleden bağımsızdır. 3.2.2. Basit Sarkacın Enerjisi 𝑠𝑖𝑛𝜃 = 𝑥 𝑙 , 𝑥 = 𝑙𝑠𝑖𝑛𝜃 , θ açısının küçük (5°den küçük) olması halinde, Sinθ≈θ olup, 𝑥 ≅ 𝑙𝜃 Dik üçgenden 𝑙 2 = (𝑙 − 𝑦)2 + 𝑥 2 = 𝑙 2 − 2𝑙𝑦 + 𝑦 2 + 𝑥 2 2𝑙𝑦 = 𝑦 2 + 𝑥 2 Küçük açılı salınımlar için 𝑥 ≪ 𝑙 𝑣𝑒 𝑦 ≪ 𝑙 olacağından 2𝑙𝑦 ≅ 𝑥 2 alınabilir [𝑦 = 𝑥2 Potansiyel enerji : 𝑈 = 𝑚𝑔𝑦 = 𝑚𝑔 2𝑙 Kinetik enerji: 𝐾 = 2 𝑚𝑣 2 Mekanik enerji: 𝐸 = 𝑈 + 𝐾 = 2 𝑚𝑔 𝑥2 2𝑙 ]. 1 1 𝑥2 𝑙 1 + 2 𝑚𝑣 2 Mekanik enerjiyi maksimum potansiyel enerji cinsinden ifade edersek : 1 𝑈𝑚𝑎𝑥 = 2 𝑚𝑔 𝐸 = 𝑈𝑚𝑎𝑥 𝐴2 𝑙 (A genlik) 1 𝐴2 1 𝑥2 1 = 𝑚𝑔 = 𝑚𝑔 + 𝑚𝑣 2 2 𝑙 2 𝑙 2 5 Leyla Yıldırım Bölüm 3 10.10.12 3.2.3. Burulma Sarkacı Küçük açılı burulmalar için geri çağırıcı tork 𝜏 = −𝐾𝜃 yazılabilir. Burada K, telin burulma sabitidir. 𝑑2𝜃 𝜏 = 𝐼𝛼 = 𝐼 2 = −𝐾𝜃 𝑑𝑡 I: diskin eylemsizlik momenti (disk düzlemine dik ve kütle merkezinden geçen eksene göre eylemsizlik momenti Ik..m. = (MR2)/2). 𝑑2𝜃 𝐼 2 + 𝐾𝜃 = 0 𝑑𝑡 𝑑2𝜃 𝑑𝑡 2 + 𝑤 2 𝜃 = 0 (BHH) Burada 𝑤 2 = 𝐾/𝐼 Denklemin çözümü: 𝜃 = 𝜃𝑚 cos(𝑤𝑡 + ∅) 𝑓= 1 2𝜋 √𝐾/𝐼 , 𝑇 = 2𝜋√𝐼/𝐾 3.2.4. Fiziksel Sarkaç 𝜏 = −(𝑚𝑔𝑠𝑖𝑛𝜃)𝑙/2 𝑑2𝜃 𝐼 2 + (𝑚𝑔𝑙/2)𝑠𝑖𝑛𝜃 = 0 𝑑𝑡 𝑠𝑖𝑛𝜃 ≅ 𝜃 (küçük açılı salınım) 𝑑2𝜃 𝐼 2 + (𝑚𝑔𝑙/2)𝜃 = 0 𝑑𝑡 𝑑2 𝜃 𝑑𝑡 2 + 𝑤 2 𝜃 = 0 (BHH) 𝐼 = 𝐼𝑘𝑚 + 𝑚(𝑙 ⁄2 )2 [𝑤 2 = 𝑚𝑔𝑙/(2𝐼)] 𝑚𝑙 2 = + 𝑚(𝑙 ⁄2)2 = 𝑚𝑙 2 /3 12 Çözüm: 𝜃 = 𝜃𝑚 cos(𝑤𝑡 + ∅) 𝑓= 1 2𝜋 √ 𝑚𝑔𝑙 2𝐼 , 𝑇 = 2𝜋√ 2𝐼 𝑚𝑔𝑙 veya 𝑓= 1 2𝜋 √ 3𝑔 2𝑙 , 𝑇 = 2𝜋√ 2𝑙 3𝑔 6 Leyla Yıldırım Bölüm 3 10.10.12 3.2.5. Yüzen Cisimler İçin Basit Harmonik Hareket Cisim serbest bırakıldığında titreşim hareketi yapar. y 𝑚: yüzen cismin kütlesi 𝐴: kesit alanı h 𝑠 : sıvının yoğunluğu 𝑊𝑠 = 𝑠 𝑔 (𝐴. 𝑦) (yer değiştiren sıvının ağırlığı) (a) Cisim yüzüyor (b) y kadar bastırılmış 𝐹 = −𝑠 𝑔(𝐴. 𝑦) 𝑑2𝑦 𝐹 = 𝑚𝑎 = 𝑚 2 = −𝜌𝑠 𝑔(𝐴𝑦) 𝑑𝑡 𝑚 𝑑2𝑦 𝑑𝑡 2 𝑤2 = + (𝜌𝑠 𝑔𝐴)𝑦 = 0 𝑇 = 2𝜋√ 𝑚 𝜌𝑠 𝑔𝐴 ; 𝑓= 1 2𝜋 √ 𝜌𝑠 𝑔𝐴 𝑚 2 𝑑 𝑦 + 𝑤2 𝑦 2 𝑑𝑡 =0 (BHH) 𝜌𝑠 𝑔𝐴 𝑚 Şekil-a’da batan kısım h olduğundan Archimed ilkesi gereği 𝜌𝑠 𝑔𝐴ℎ = 𝑚𝑔 𝑚 = 𝜌𝑠 𝐴ℎ yazabiliriz. Bu değeri periyot (veya freakns) ifadesinde yerine yazarak; 𝑇 = 2𝜋√ ℎ 𝑔 ve 𝑓= 1 2𝜋 𝑔 √ℎ elde ederiz. 3.2.6. Esneklik ve Young Modülü Katı cisimlerin esneklik özelliklerinin incelenmesi ile atomlar ve moleküller arasındaki bağlayıcı kuvvetler hakkında bilgi elde edilebilir. Özel koşullarda büyütülen tek-kristaller, esneklik açısından anizotropik özellik gösterirler. Farklı kristal doğrultularında ultrases hızı ve esneklik sabitlerinin ölçülmesi ile esneklik özellikleri ve bağlar hakkında yorumlar yapılabilir. Hiç esneklik göstermeyen bir katı maddenin varlığı düşünülemez. Her cisim, üstüne uygulanan kuvvete, ancak belirli bir ölçüye kadar dayanabilir. Uygulanan cismin özelliklerine bağlı kalma koşuluyla, cismin dayanabilme yeteneği, boyut, biçim ya da hacim değişikliği olarak ortaya çıkar. Kuvvet uygulanan kuvvet ortadan kalktığında, cisim, yeniden eski büyüklüğünü ve biçimini kazanırsa, esneklikten söz edilebilir. Bütün katı ve sıvılar, belirli sınırlara kadar esneklik özelliği gösterir. Bu sınıra esneklik sınırı denir. Young Modülü (elastisite modülü), malzemenin kuvvet altında elastik şekil değiştirmesinin ölçüsüdür. 7 Leyla Yıldırım Bölüm 3 10.10.12 Aynı malzemeden yapılmış, kalınlıkları (kesitleri) farklı iki çelik tel, bir tavana bağlanır ve uçlarına eşit ağırlıklar asılırsa, ince olan tel daha fazla uzama gösterir. Bunun nedeni, ince telin kesitinde birim alana uygulanan kuvvetin, kalın telinkine uygulanandan fazla olmasıdır. Kuvvetin, bu kesitin alanına oranına zor (stress) denir. Önceki örnekte ele alınan çelik teller, bu kez aynı kalınlıkta, ama değişik boyda seçilirse, uzun olan telde daha çok uzama oluşacaktır. Çekme gerilmesinin boyca uzama oranına bölümü, Young modülünü verir ve yukarıdaki iki durum için de aynıdır. Mühendislikte, basma ve çekme zorlamaları etkisi altında çalışacak malzemelerin seçiminde, Young modülü büyük önem taşır. Sözgelimi, bir köprünün tasarımında direklerin ne kadar yüke dayanacağını, dolayısıyla seçilecek malzemenin Young modülünü, bilmek gerekir. Bir çubuğun veya yayın gerilmesini ele alarak esneklik ve Young modülünü irdeleyelim. Denge durumunda böyle bir sistemin davranışı aşağıdaki gibi tarif edilebilir; 1. Yanda verilen şekildeki gibi bir ucu duvara tutturulmuş çubuğun diğer ucuna bir F kuvveti uygulanması durumda noktalarının çubuğun yer değişik değiştirmesi bu noktaların sabit uca olan uzaklıkları ile orantılıdır. Çubuğun bir ucuna uygulanan F kuvveti çubuğun tüm uzunluğu boyunca F büyüklüğünde bir gerilme meydana getirir. Belli bir kesit alana sahip çubuk ya da tel şeklindeki bir cisimde kuvvet etkisi altındaki l uzama miktarı cismin kuvvet uygulanmadan önceki boyu l0 ile orantılıdır. Boyutsuz olan l/l0 oranına zorlnama (strain) denir. 2. Değişik kesit alanlara sahip çubuk şeklindeki cisimler için aynı zorlanma, şekilde görüldüğü gibi kesit alanlara orantılı uygulanan kuvvetlerle de meydana getirilebilir. F/A oranına zor denir ve basınç boyutundadır. 3. Eğer zorlanma çok küçük ise (kuvvet uygulanmadan önceki uzunluk olan l0 değerinin %0.1’inden küçük) zor ve zorlanma arasındaki ilişki Hook kanununa göre lineerdir. 8 Leyla Yıldırım Bölüm 3 10.10.12 Young modülü için 𝑧𝑜𝑟 𝑠𝑡𝑟𝑒𝑠𝑠 𝑧𝑜𝑟𝑙𝑎𝑛𝑚𝑎 (küçük gerilmelerde) = 𝑆𝑡𝑟𝑎𝑖𝑛 = 𝑠𝑎𝑏𝑖𝑡 𝐹/𝐴 = −𝑌 𝑙/𝑙0 ya da 𝑑𝐹 = − 𝐴𝑌 𝑑𝑙 𝑙0 yazabiliriz. F kuvveti, x ise uzamayı gösterirsek, yukarıdaki ifadeyi 𝐹=− 𝐴𝑌 şeklinde de yazabiliriz. İfadedeki ( 𝑙0 𝐴𝑌 𝑥 𝑙0 ) terimine 𝑘 dersek, yaya bağlı bir kütle için yazdığımız geri çağırıcı kuvvet ifadesini elde ederiz. Bu durumda sistem BHH yapar. 𝑑2𝑥 𝐴𝑌 𝑚𝑎 = 𝑚 2 = − 𝑥 𝑑𝑡 𝑙0 𝑑2 𝑥 𝐴𝑌 + 𝑥=0 𝑑𝑡 2 𝑚𝑙0 Hareketin periyodu 𝑇 = 2𝜋√ 𝑚𝑙0 𝐴𝑌 𝑤2 = 𝐴𝑌 𝑚𝑙0 ifadesi ile verilir. Örneğin 1 kg’lık bir kütle 1 m uzunluğunda ve 1 mm çapındaki bir çelik tele asılmış ise (çelik için Y=20x1010 N/m2) periyot değerini bulalım. 𝜋𝑑 2 𝑘𝑒𝑠𝑖𝑡 𝑎𝑙𝑎𝑛𝚤: 𝐴 = = 0.8𝑥10−6 𝑚3 4 𝐴𝑌 𝑤=√ 𝑚𝑙0 = 400 𝑟𝑎𝑑/𝑠 , 𝑇= 2𝜋 𝑤 = 6.28 400 ≅ 0.016 𝑠 Eğer m kütleli cisim biraz önce bahsedilen tele asılmış ve statik denge sağlanmış iken denklemler buna göre yazılırsa, 𝑚𝑔 = 𝐴𝑌 𝑙0 ℎ 𝑚𝑙0 𝐴𝑌 = ℎ 𝑔 ℎ olur. Bu ifade periyot eşitliğinde yerine konulursa, 𝑇 = 2𝜋√𝑔 elde edilir. Bulunan bu sonuç h uzunluğunda bir sarkacın periyot ifadesi ile aynıdır. Bu ifade, tel ya da ucuna asılmış kütle hakkında hiçbir bilgiye sahip olmaksızın statik uzama ölçümleri ile periyodun hesaplanmasına oldukça basit bir 9 Leyla Yıldırım Bölüm 3 10.10.12 yol temin eder. 3.2.7. Elektrik Devrelerinde Osilasyonlar İndüktans (L) ve kapasitans (C) içeren bir devre BHH salınım özellikleri gösterir. Bu tür devreleri laboratuarlarda inceleyeceğiz. 𝑄 𝐶 𝑑𝑖 + 𝐿 𝑑𝑡 = 0 𝑖= 𝑑𝑄 devre denklemi olduğunu kullanırsak 𝑑𝑡 𝑑2 𝑄 𝑄 + 𝐿 𝑑𝑡 2 = 0 𝐶 𝑑2 𝑄 𝑑𝑡 2 𝑑2 𝑄 𝑑𝑡 2 1 + 𝐿𝐶 𝑄 = 0 1 𝑤 2 = 𝐿𝐶 diyelim + 𝑤 2 𝑄 = 0 (BHH) elde edilir. Bu denklem ile 𝑑2 𝑥 𝑑𝑡 2 + 𝑤 2𝑥 = 0 (Kütle yay sistemi) denklemi matematiksel olarak aynıdır. Çözüm : 𝑄 = 𝑄0 𝐶𝑜𝑠(𝑤𝑡 + ∅) 𝑤= 1 √𝐿𝐶 1 𝑓 = 2𝜋 1 √𝐿𝐶 ve 𝑇 = 2𝜋√𝐿𝐶 İndüktanstan geçen akım: 𝐼 = 𝑑𝑄 𝑑𝑡 = −𝑄0 𝑤𝑆𝑖𝑛(𝑤𝑡 + ∅) LC devresi ile Kütle-Yay sistemi arasındaki benzerlikler 1) x Q 2) k 1 𝐶 3) m L 4) 𝑤 = √ 𝑘 𝑚 𝑤= 1 1 2 2 5) 𝐸 = 𝑚𝑣 2 + 1 √𝐿𝐶 1 1 𝑄2 2 2 𝐶 𝑘𝑥 2 𝐸 = 𝐿𝑖 2 + 10 Leyla Yıldırım Bölüm 3 10.10.12 SERBEST TİTREŞİMLERİN BOZULMASI Sönümlü Hareket ve Sönümlü Harmonik Haraket Salınan bir sistemin üzerine bir sürtünme kuvveti etki ederse salınım genliği, sürtünme nedeniyle yavaş yavaş küçülerek sıfır olur. Bu cins salınımlara SÖNÜMLÜ HARMONİK HARAKET denir. Şimdi sürtünme kuvveti gibi korunumsuz kuvvetlerin işe girmesiyle serbest titreşim ifadelerinin nasıl değişikliğe uğradığını tartışacağız. Genellikle sürtünme hava direncinden veya iç kuvvetlerden kaynaklanır. Sürtünme kuvvetlerinin büyüklüğü çoğu kez hıza bağlıdır. Pek çok örnekte sürtünme kuvvetinin büyüklüğü hız ile orantılı olup, hız doğrultusunda, hıza zıt olarak yönelmiştir. Kütle-yay sistemini yeniden ele alalım. Şekilde görüldüğü gibi yaya asılı olan bir kütlenin salınım yaparken sıvı dolu bir kap içine batırıldığını düşünelim. Bu kütle sönümlü hareket yapacaktır. Şekil 3.12. KABULLERİMİZ: Potansiyel enerjinin tümünün, kütlesiz ve hiçbir sürtünme kuvvetinin etkimediği ideal yayda toplandığı kabul edilecektir. Kinetik enerjinin tümü salınan m kütlesinde toplandığı kabul edilecek. Tüm ısı şeklindeki iç enerjinin, kabı dolduran vizkoz sıvıda ortaya çıktığı kabul edilecek. Sönümlü hareketin denklemi 𝑭 = 𝑚𝒂 şeklindeki ikinci Newton yasasından elde edilir. Kütleye 𝑑𝑥 etki eden 𝐹 kuvveti, geri çağırıcı – 𝑘𝑥 şeklindeki kuvvet ile −𝑏 𝑑𝑡 şeklindeki sürtünme kuvvetlerinin toplamıdır. Burada 𝑏 bir sabit olup sönüm kuvvetinin büyüklüğünün bir ölçüsüdür. Bu durumda hareket denklemini 𝑚𝑎 = −𝑘𝑥 − 𝑏 𝑑𝑥 𝑑𝑡 (1) olarak yazabiliriz veya 𝑚 𝑑2𝑥 𝑑𝑡 2 +𝑏 𝑑𝑥 𝑑𝑡 + 𝑘𝑥 = 0 (2) olur. Bu denklemi yeniden 11 Leyla Yıldırım Bölüm 3 𝑑2𝑥 𝑑𝑡 2 + 𝑏 𝑑𝑥 𝑚 𝑑𝑡 + 𝑘 𝑚 10.10.12 𝑥=0 (3) şeklinde düzenlenebilir. 𝑏 =𝑚 𝑘 𝑤02 = 𝑚 ve 𝑑2 𝑥 𝑑𝑥 𝑑𝑡 𝑑𝑡 2 + kısaltmaları yapıldığında, + 𝑤02 𝑥 = 0 (4) yazabiliriz. İfadedeki sönüm frekansı boyutunda bir niceliktir, w0 ise sönüm olmadığı durumdaki serbest titreşimlerin açısal frekansını verir. Bu denklemi kısaca 𝑥 ′′ + 𝑥 ′ + 𝑤02 𝑥 = 0 (5) şeklinde yazabiliriz. Buradaki ve 𝑤02 nicelikleri gerçek ve sabit sayılardır. Sabit katsayılı ikinci dereceden homojen denklemdir. Bu denklem sabit katsayılı ikinci dereceden, lineer, homojen bir diferansiyel denklemdir. Bu denklemin çözümünü matematik kitaplarından yararlanarak yapabilirsiniz (Ross, Differansiyel Denklemler, Kenneth Franklin Riley, Michael Paul Hobson, Stephen John Bence, Mathematical methods for physics and engineering, …). Bu denklemde 𝑟 belirlenmesi gereken bir parametre olmak üzere, 𝑥 = 𝑒 𝑟𝑡 şeklinde alınırsa ve 𝑥′ = 𝑟𝑒 𝑟𝑡 ve 𝑥′′ = 𝑟 2 𝑒 𝑟𝑡 ifadeleri denklem (5)’de yerine konulursa, 𝑥 = 𝑒 𝑟𝑡 𝑥′ = 𝑟𝑒 𝑟𝑡 ve (6) 𝑥′′ = 𝑟 2 𝑒 𝑟𝑡 (7) (𝑟 2 + 𝑟 + 𝑤02 )𝑒 𝑟𝑡 = 0 (8) elde edilir. 𝑒 𝑟𝑡 sıfır olamaycağından, (𝑟 2 + 𝑟 + 𝑤02 ) = 0 (9) olmak zorundadır. Bu denkleme karakteristik denklem adı verilir ve bu denklemin çözümünün iki kökü vardır. Bu kökler, 1 (10) 1 (11) 𝑟1 = 2 (− + √2 − 4𝑤02 ) 𝑟2 = 2 (− − √2 − 4𝑤02 ) şeklinde yazılabilir. 12 Leyla Yıldırım Bölüm 3 10.10.12 = √2 − 4𝑤02 değerine göre bu denklemin çözümünde üç farklı durum söz konusudur. (𝑟 2 + 𝑟 + 𝑤02 ) = 0 1 = √2 − 4𝑤02 2 2 > 4𝑤02 >0 ve =0 3 2 = 4𝑤02 2 < 4𝑤02 <0 Kiritik Üstü Sönüm (Over-damped) Kritik Sönüm (Critical-damped) Kritik Altı Sönüm (Under-damped) denklemin farklı iki reel kökü vardır 𝒓𝟏 ≠ 𝒓𝟐 denklemin eşit iki reel kökü vardır 𝒓𝟏 = 𝒓𝟐 denklemin reel kökü yoktur, komplex iki farklı kökü vardır. 𝒓𝟏 𝒗𝒆 𝒓𝟐 komplex 1 𝑟1 = 𝑟2 = − 2 1 𝑟1 = 2 (− + √2 − 4𝑤02 ) 𝑤= 1 𝑟2 = 2 (− − √2 − 4𝑤02 ) 1 √4𝑤02 − 2 = √𝑤02 − 2 ⁄4 2 𝑥 = (𝐴 + 𝐵𝑡)𝑒 𝑟1 𝑡 𝑟1 = − 2 + 𝑖𝑤 𝑟2 = − 2 − 𝑖𝑤 𝑥 = 𝐴𝑒 𝑟1 𝑡 + 𝐵𝑒 𝑥 = 𝑒 −2𝑡 (𝐴𝑠𝑖𝑛𝑤𝑡 + 𝐵𝑐𝑜𝑠𝑤𝑡) 𝑟2 𝑡 Yukarda tanımlanan üç farklı sönümlü hareketi aşağıdaki şekilde özetlenmiştir. 𝑏 2 Kritik sönüm (𝑚) = 4𝑤02 𝑏 2 Kritik üstü sönüm (𝑚) > 4𝑤02 𝑏 2 Kritik altı sönüm (𝑚) < 4𝑤02 13 Leyla Yıldırım Bölüm 3 1. Kiritik Üstü Sönümlü Hareket >4 2 𝑤20 𝑏 𝑦𝑎𝑛𝑖 ( ) 𝑚 (Over-Damped) 2 > 4𝑤20 2 𝑏 𝑏 = √ − 4𝑤20 = √(𝑚 ) − 4𝑤02 2 2 𝑟1 = − + 10.10.12 =𝑚 2 2 ve 𝑟2 = − − 𝑣𝑒 𝑤02 = 𝑘 𝑚 olacaktır. Denklem 4 için elde edilecek çözüm 𝑥(𝑡) = 𝐴𝑒 𝑟1𝑡 + 𝐵𝑒 𝑟2𝑡 𝑥 (𝑡) = 𝐴𝑒 (−2+ 2 )𝑡 + 𝐵𝑒 (−2 − 2 )𝑡 𝑡 𝑡 = 𝐴𝑒 − 2 𝑒 2𝑡 + 𝐵𝑒 − 2 𝑒 − 2𝑡 veya 𝑏𝑡 𝑥(𝑡) = 𝑒 −2𝑚 [𝐴𝑒 2𝑡 + 𝐵𝑒 −2𝑡 ] elde edilir. A ve B katsayıları başlangıç koşullarından bulunabilir. 𝑏 2 Bu koşulda [(𝑚) > 4𝑤02 ] hareket zamanla üstel olarak söner ve cisim denge konumunda durur. Bu tip çözüm KRİTİK ÜSTÜ SÖNÜM olarak adlandırılır. Bu durumda hareket SALINIMLI DEĞİLDİR. 2. Kritik Sönümlü Hareket (Critically Damped) 𝑏 2 2 = 4𝑤02 yani (𝑚) = 4𝑤02 𝑏 2 = 4𝑘𝑚 olur. Bu durumda 𝑟1 ve 𝑟2 kökleri için 𝑏 2 2𝑚 𝑟1 = 𝑟2 = − = yazabiliriz. Bu durumda (4) denklemin çözümü için 𝑏t x(t) = (A + Bt)e−2m 14 Leyla Yıldırım Bölüm 3 10.10.12 yazabiliriz. Burada A ve B sabitleri başlangıç koşullarından elde edilir. Zaman ilerledikçe x'in değeri sıfıra yaklaşır. HAREKET SALINIMLI DEĞİLDİR. Bu tip sönüme KRİTİK SÖNÜM denir. 3. Kritik Altı Sönüm (Sönümlü Harmonik Hareket) 2 − 4𝑤02 yani 2 < 4𝑤02 negatif 𝑏 2 (𝑚) < 4𝑤02 ( 𝑏 2 < 4𝑘𝑚 ) 2 2 = √2 − 4𝑤20 = √(−1)(4𝑤20 − ) = 𝑖 √4𝑤20 − 1 2 𝑤 = √4𝑤20 − = √𝑤20 − 2 ⁄4 ≠ 0 2 2 2 𝑟1 = − + 𝑖𝑤 ve 𝑟2 = − − 𝑖𝑤 𝑥1 = 𝑒 𝑟1𝑡 = 𝑒 (− +𝑖𝑤)𝑡 𝑥2 = 𝑒 𝑟2𝑡 = 𝑒 (− −𝑖𝑤)𝑡 2 2 t t 𝑥 (𝑡) = 𝐶1 𝑒 𝑟1 𝑡 + 𝐶2 𝑒 𝑟2 𝑡 = 𝐶1 e− 2 e𝑖 𝑤𝑡 + 𝐶2 e− 2 e−𝑖 𝑤𝑡 veya bt 1 1 2 2 𝑥(𝑡) = e−2m [𝐴𝑠in ( √4𝑤02 − 2 𝑡) + 𝐵𝑐𝑜𝑠 ( √4𝑤02 − 2 𝑡)] yazabiliriz. Bu durumda genel çözüm: 𝑏𝑡 𝑥 = 𝑒 −2𝑚 (𝐴𝑠𝑖𝑛𝑤𝑡 + 𝐵𝑐𝑜𝑠𝑤𝑡) ifadesi de denklemin çözümüdür. Burada A ve B başlangıç koşullarından belirlenir. Salınıcı sönümlü harmonik hareket yapar. Bu ifadeyi sadece sinüse veya cosnüse çevirmek hareketi daha kolay yorumlamamızı sağlayacaktır. Bunun için, A = 𝐴0 sin, B = 𝐴0 cos, 𝐴0 = √A2 + B2 , A 𝑡𝑎𝑛 = B eşitlikleri ile tanımlı iki yeni 𝐴0 ve sabitlerine geçebiliriz. γt 𝑥(𝑡) = e− 2 ⦋(𝐴0 sin𝑤𝑡 𝑠in + 𝐴0 𝑐𝑜𝑠𝑤𝑡 𝑐os⦌) 15 Leyla Yıldırım Bölüm 3 10.10.12 γt = 𝐴0 e− 2 ⦋(𝑐𝑜𝑠𝑤𝑡 cos + sin𝑤𝑡 𝑠in⦌) γt 𝑥(𝑡) = γt 𝐴0 e− 2 𝑥(𝑡) = 𝐴0 e− 2 cos [(√𝑤02 − 2 ⁄4 t − )] veya cos(𝑤𝑡 − ) yazabiliriz. Burada 𝐴0 genlik, faz sabitidir. Faz sabitini = 0 seçmekte bir sakınca yoktur. Bu durumda çözüm için − 𝑥(𝑡) = 𝐴0 e bt 2m cos [√𝑤02 − 2 ⁄4 t]= 𝐴0 e t −2 cos(wt) yazabiliz. Bu çözümden, cismin bir titreşim hareketi yaptığı, Fakat genliğinin zaman içinde üstel olarak azaldığı görülür. Sönüm dolaysıyla cismin enerjisi korunmaz. Hareketin Periyodu: 𝛾2 𝑤𝑇 = √𝑤02 − 𝑇= 4 2 √𝑤02 − 𝛾 4 𝑇= 2 𝑇 = 2 = olmalı. Buradan T için 2 √( 𝑘 ) − 1 ( 𝑘 )2 𝑚 4 𝑚 4𝑚 √4𝑘𝑚−𝑏2 = 2 √4𝑘𝑚 −2 𝑏 4𝑚 ve frakansı için Eğer b = 0 olursa, periyot ve frekans 2 𝑓= √4𝑘𝑚−𝑏2 𝑇 = 2 √ 4𝑚 𝑚 𝑘 elde ederiz ve 𝑓 = 1 2 √ 𝑘 𝑚 olur. Bu özel durumun basit harmonik harekete (BHH) karşı geldiğini hatırlayalım. γt 𝑥(𝑡) = 𝐴0 e− 2 cos [√𝑤02 − 2 ⁄4 t] 'nin grafiği aşağıda verilmiştir. 16 Leyla Yıldırım Bölüm 3 10.10.12 𝐴𝑛 ve 𝐴𝑛+1 ardışık iki genlik olsun. Buralarda cosinüs çarpanı 1'e eşit olur. Bu durumda ardışık iki genliğin oranı, t n+1 = t n + T γ 𝐴𝑛 𝐴𝑛+1 − t 𝐴0 e 2 n = γ − t 𝐴0 e 2 n+1 =e γ (t −t ) 2 n+1 n =e γT 2 Her iki tarafın doğal logaritmasını alalım. 𝐿𝑛 ( 𝐴𝑛 𝐴𝑛+1 ) = γT 2 Bu değere logaritmik decrement denir. Logaritmik decrement genliğin azalmasının bir ölçüsüdür. 𝐿𝑛 ( 𝐴𝑛 γT bT ) = = 𝐴𝑛+1 2 2m Birçok sistemdeki salınım hareketi dikkate alındığında (saatlerde olduğu gibi), sönümün çok küçük hale getirilmesine ihtiyaç vardır. Araba yayalarında olduğu gibi diğer sistemler için salınımlar sorun oluşturur, bu nedenle yeterli miktarda bir sönüm (kritik sönüm) tercih edilir. Sönümlü hareketin ortalama ömrü (Zaman Sabiti ) ve kalite faktörü: γ 2 = 1b 2m sabiti salınımın genliğinin zamanla ne kadar çabuk azalarak sıfıra gittiğinin bir ölçüsüdür. = 2𝑚 𝑏 zamanı salınımın orjinal genliğinin 1⁄𝑒 'sine düşmesi için geçen süredir. Bu süresi salınımların "ortalama ömrü" olarak adlandırılır. 17 Leyla Yıldırım Bölüm 3 10.10.12 Büyük b değerleri için, salınımların daha kısa süre içerisinde azalarak yok olduğu söylenebilir. 𝑡 bt − 2 𝑥 (𝑡) = 𝐴0 e−2m cos [√𝑤 ⏟ 0 − 𝑏 2 ⁄(4𝑚2 ) t] = (𝐴0 e ) cos(wt) w İfadesinde, b arttıkça w değeri azalır, dolayısıyla hareketin periyodu artar. Bu durumda 𝑏𝑘2 = 4𝑚𝑘 = 4𝑚2 𝑤02 olduğunda, w=0 olur. b’nin bu değerine kritik b denir ve bk ile gösterilir, 𝑏𝑘 = √4𝑚𝑘. Bu durumda sistem kritik sönümlüdür. b < bk olduğunda genlik azalmakla birlikte, sistem yine de salınır. Buna kritik altı sönüm denir. b > bk olduğunda ise, sistem aşırı sönümlüdür. Sönümün şiddeti, herhangi bir salınım olmaksızın sistemi denge durumuna döndürecek kadar büyüktür. İlk yer değiştirmenin ardından kütle denge noktasından en fazla bir kez geçer. 𝑥(𝑡) ifadesinde salınım t − genliğinin zamanla değişimini veren e 2 üstel fonksiyonun üstü boyutsuz olduğu için t’nin çarpanı = 𝑏⁄2𝑚 teriminin [zaman-1] boyutunda olması gerekir. Bu nedenle, sönümlü salınımların ortalama ömrü = 𝟐𝒎⁄𝒃 ile verilir. Bu durumda genlik fonksiyon 𝐴0 𝑒 −𝑡/ şeklinde yazılır.’nun büyük değerlerinde sönüm yavaş olur. Sönümü başka bir şekilde, 𝑤0 𝑤0 𝑚 𝑄= = 2 𝑏 olarak verilen Q parametresi ile de ifade edilir. Görüldüğü gibi Q, ile orantılıdır. Q’nun büyük değerleri yavaş sönümlere karşı gelir. Q’ya kalite faktörü denmektedir. Farklı Q değerleri için x(t)’nin grafikleri yanda verilmiştir. Sönümlü salınıcı sisteminde kullanılan değişik malzemelere ait Q değerleri aşağıda tabloda veriliştir. Q>1 olduğunda kritik altı sönümlü harmonik hareket oluşur. Sönümlü salınıcı sistemi Q değeri Saat sarkacı 200 Mikrodalga kavite osilatörü 104 Quartz crystal 106 18 Leyla Yıldırım Bölüm 3 10.10.12 SÖNÜMLÜ HARMONİK HAREKETTE ENERJİ KAYIP ORANI Sönümlü harmonik hareketin enerjisi sürtünme veya hareketi engelleyici kuvvetler (korunumsuz kuvvet) nedeniyle azalır. Sistemin toplam mekanik enerjisi E, 1 1 𝐸 = 𝐾 + 𝑈 = 𝑚𝑣 2 + 𝑘𝑥 2 2 2 dir. Burada kritik altı sönümlü durumu (sönümlü harmonik hareket) (2 ≪ 4𝑤02 ) ele alalım. t bt 𝑥(𝑡) = 𝐴0 e−2m cos (√𝑤02 − 2 ⁄4 t) = 𝐴0 e− 2 [ cos(wt)] Bu durumda 2 𝑤 = 𝑤02 − 2 4 eşitliği ( ≪ 4𝑤02 ) durumunda yaklaşık 𝑤 ≅ 𝑤0 yazılabilir. Bu durumda 𝑥(𝑡) için 2 t − 𝑥(𝑡) = 𝐴0 e 2 cos(w0 t) yazabiliriz. Buradan hız için 𝑣(𝑡) = 𝑡 𝑑𝑥 𝑡 = −𝐴0 𝑒 − 2 cos(𝑤0 𝑡) − 𝐴0 𝑤0 𝑒 − 2 sin(𝑤0 𝑡) 𝑑𝑡 2 elde ederiz. ≪ 𝑤0 olduğu kabul edildiğine göre, hız ifadesindeki ilk terim ihmal edilerek, 𝑡 𝑣(𝑡) = −𝐴0 𝑤0 𝑒 − 2 sin(𝑤0 𝑡) yazılabilir. Bu toplam enerji ifadesinde yerine konulursa, 1 1 𝐸 = 𝐾 + 𝑈 = 𝑚𝑣 2 + 𝑘𝑥 2 2 2 1 𝐸 = 𝑚 (−𝐴0 𝑤0 𝑒 2 𝑡 − 2 2 1 t − sin(𝑤0 𝑡)) + 𝑘 (𝐴0 e 2 2 2 cos(w0 t)) 1 1 = 𝑚𝐴20 𝑤02 𝑒 −𝑡 sin2 (𝑤0 𝑡) + 𝑘𝐴20 𝑒 −𝑡 cos 2 (𝑤0 𝑡) 2 2 1 = 𝐴20 𝑒 −𝑡 [𝑚𝑤02 sin2 (𝑤0 𝑡) + 𝑘 cos 2 (𝑤0 𝑡)] 2 𝑘 𝑤0 = 𝑚 olduğuna göre, 1 𝑘 𝐸 = 𝐴20 𝑒 −𝑡 [𝑚 sin2 (𝑤0 𝑡) + 𝑘 cos 2 (𝑤0 𝑡)] 2 𝑚 1 = 𝑘𝐴20 𝑒 −𝑡 = 𝐸0 𝑒 −𝑡 2 elde ederiz. Burada E0, t = 0 anındaki toplam mekanik enerjidir. Eşitlikten de anlaşılacağı gibi ’nın boyutu (zaman-1) dir. Enerjinin ilk değerinin 1/e değerine düşmesi için geçen zamana sönüm zamanı 19 Leyla Yıldırım Bölüm 3 10.10.12 (decay time) veya zaman sabiti (time constant) denir ve ile gösterilir. = 1 1 𝑚 = = 𝑏/𝑚 𝑏 Bu durumda enerji ifadesi 𝐸 = 𝐸0 𝑒 −𝑡/ şeklinde yazılabilir. Klasik ve kuantum mekaniğindeki birçok sistemin enerjisi üstel olarak azalır. Bu tür sistemlerde zaman sabiti olarak adlandırılır. Böyle sistemlerin enerjisinin zamanla değişimi üstteki grafikte verilmiştir. Enerjinin değişim hızı: 𝑑𝐸 𝑑 1 1 𝑑𝑣 𝑑𝑥 = ( 𝑚𝑣 2 + 𝑘𝑥 2 ) = 𝑚𝑣 + 𝑘𝑥 𝑑𝑡 𝑑𝑡 2 2 𝑑𝑡 𝑑𝑡 𝑑𝑣 = 𝑚𝑣 + 𝑘𝑥𝑣 = (𝑚𝑎 + 𝑘𝑥)𝑣 𝑑𝑡 hareket denkleminin 𝑚𝑎 + 𝑏𝑣 + 𝑘𝑥 = 0 𝑚𝑎 + 𝑘𝑥 = −𝑏𝑣 olduğunu hatırlarsak 𝑑𝐸(𝑡) = (𝑚𝑎 + 𝑘𝑥)𝑣 = −𝑏𝑣 2 𝑑𝑡 elde ederiz. Bu bağıntı da enerjin sürekli azaldığını gösterir. Enerjideki azalma miktarını kalite faktörü Q cinsinden de yazabiliriz. Buradan faydalanarak 𝐸(𝑡) = 𝐸0 𝑒 −𝑡 ifadesini yeniden ele alalım. 𝐸(𝑡1 ) = 𝐸1 = 𝐸0 𝑒 −𝑡1 𝐸(𝑡2 ) = 𝐸0 𝑒 −𝑡2 = 𝐸2 = 𝐸0 𝑒 −(𝑡1+𝑇) 𝐸2 𝐸1 = 𝑒 −(𝑡1+𝑇) 𝑒 −𝑡1 = 𝑒 −𝑇 ≅ 1 − 𝑇 (t2=t1+T bir periyot sonraki zaman) (𝑇 ≪ 1) yazabiliriz. Buradan 𝐸2 − 𝐸1 = −𝑇 𝐸1 20 Leyla Yıldırım Bölüm 3 10.10.12 Enerji değişiminin ilk enerjiye oranı: 𝐸1 − 𝐸2 2𝜋 2𝜋 2𝜋 = 𝑇 = = = 𝐸1 𝑤0 𝑤0 𝑚⁄𝑏 𝑄 olur. Bu ifade kalite faktörü Q için yeni bir tanımlama getirmektedir. 𝑄= 𝐸1 (𝐸1 −𝐸2 )/(2𝜋) 2 𝑤 = 𝑤02 − 2 4 = = 𝑜𝑠𝑖𝑙𝑎𝑡ö𝑟𝑑𝑒 𝑑𝑒𝑝𝑜𝑙𝑎𝑛𝑎𝑛 𝑒𝑛𝑒𝑟𝑗𝑖 𝑄 𝑟𝑎𝑑𝑦𝑎𝑛 𝑏𝑎ş𝚤𝑛𝑎 𝑒𝑛𝑒𝑟𝑗𝑖𝑑𝑒𝑘𝑖 𝑘𝑎𝑦𝚤𝑝 𝑤0 𝑤02 = 𝑚 𝑏 (𝑏⁄𝑚)2 1 𝑤0 2 1 2 − = 𝑤0 − ( ) = 𝑤02 (1 − 2 ) 4 4 𝑄 4𝑄 1 1/2 𝑤 = 𝑤0 (1 − 2 ) 4𝑄 Q’nun büyük değerlerinde sönüm az olur ve 𝑤 ≅ 𝑤0 alabiliriz. Örneğin Q=5 için, 𝑤 = 𝑤0 (1 − 1 1/2 ) 4∗52 = 𝑤0 (1 − 1 1/2 ) 100 = 𝑤0 (1 − 0.01)1/2 = 0.99𝑤0 ≅ 𝑤0 SÖNÜMLÜ ELEKTRİKSEL OSİLASYONLAR Daha önce bir LC devresindeki osilasyonları incelemiştik. Bu devrenin BHH salınımı yaptığını görmüştük. Şimdi devreye bir R direnci ekleyeceğiz. Devredeki C kondansatörü VC voltajı ile yüklendiğinde, 𝑉𝐶 = 𝑞 𝐶 kondansatör üzerinde q yükü depolanacaktır. Daha sonra S anahtarı kapatılırsa, devre için yazabiliriz. 𝐼= Eşitlikleri yerine konulursa, 𝑑𝑞 𝑑𝐼 𝑑2 𝑞 𝑣𝑒 = 𝑑𝑡 𝑑𝑡 𝑑𝑡 2 21 Leyla Yıldırım Bölüm 3 10.10.12 Mekanik Elektrik denklemi elde edilir. Bu denklem sönümlü harmonik hareket denklemi olan, denklemi ile aynıdır. Bu iki denklem karşılaştırıldığında, mekanik sistemdeki büyüklükler ile RLC elektrik devresindeki büyüklükler arasında benzerlikler yanda verilmiştir. Bu benzetişimden yararlanarak devre denkleminin çözümü için sistemi Sistemi x q m L k 1/C b R =b/m =R/L yazabiliriz. Burada q0, kondansatörün başlangıçtaki yüküdür. Bu durum sönümlü harmonik hareketi incelerken 2 < 4𝑤02 yani 𝑏 2 << 4𝑘𝑚 koşuluna karşı gelmektedir (kritik altı çözüm) yani 𝑅2 𝑅2 < 4𝐿2 𝐶 1 veya 4𝐿2 < 𝐶 dir. 𝑉𝐶 = 𝑞/𝐶 olduğu için 1 1/2 𝑅 𝑞0 𝑅 1 𝑅2 2 1 𝑅2 𝑉𝐶 = 𝑒 −2𝐿𝑡 cos [( − 2 ) 𝑡] = 𝑉0 𝑒 −2𝐿𝑡 cos [( − 2 ) 𝐶 𝐿𝐶 4𝐿 𝐿𝐶 4𝐿 𝑡] yazabiliriz. Burada 𝑉0 , başlangıçtaki voltaj değeridir. Bu sistemin açısal frekansı 1 𝑅2 − 2 𝐿𝐶 4𝐿 𝑤2 = olacaktır. 𝑅2 1) Eğer 4𝐿2 ≪ 1 𝐿𝐶 ise (kritik altı sönüm), 1 Sistem sönümlü harmonik hareket yapar ve sistemin açısal frekansı 𝑤 ≅ √𝐿𝐶 olacaktır. Voltajın genliği 𝑅 ⁄(2𝐿) zaman sabiti ile üstel olarak azalacaktır. R/L’nin boyutu (zaman-1) dir. 𝑅2 2) 3) 4𝐿2 𝑅2 4𝐿2 1 > 𝐿𝐶 koşulu sağlandığında kritik üstü sönüm. 1 = 𝐿𝐶 koşulu sağlandığında kritik sönüm olacağı açıktır. Mekanik sistemde tanımladığımız Q kalite faktörünün karşılığı ise 𝑄 = Örneğin L=10 mH, C=2.5 nF ve R=10 olursa, 𝑤0 1 𝐿 = 𝑅 √𝐶 olacağı açıktır. Q=200 olacaktır. Q kalite faktörü kullanılarak mekanik ve elektrik sistemlerinde sönümlü harmonik hareketin denklemi 𝑑2 𝑥 𝑑𝑡 2 + 𝑤0 𝑑𝑥 𝑄 𝑑𝑡 + 𝑤02 𝑥 = 0 ve 𝑑2 𝑞 𝑑𝑡 2 + 𝑤0 𝑑𝑞 𝑄 𝑑𝑡 + 𝑤02 𝑞 = 0 şeklinde yeniden yazılabilir. 22